Archetypes
rerun.archetypes
class AnnotationContext
Bases: Archetype
Archetype: The annotation context provides additional information on how to display entities.
Entities can use components.ClassIds and components.KeypointIds to provide annotations, and
the labels and colors will be looked up in the appropriate
annotation context. We use the first annotation context we find in the
path-hierarchy when searching up through the ancestors of a given entity
path.
See also datatypes.ClassDescription.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
Example
Segmentation:
import numpy as np
import rerun as rr
rr.init("rerun_example_annotation_context_segmentation", spawn=True)
# Create a simple segmentation image
image = np.zeros((200, 300), dtype=np.uint8)
image[50:100, 50:120] = 1
image[100:180, 130:280] = 2
# Log an annotation context to assign a label and color to each class
rr.log("segmentation", rr.AnnotationContext([(1, "red", (255, 0, 0)), (2, "green", (0, 255, 0))]), static=True)
rr.log("segmentation/image", rr.SegmentationImage(image))

def __init__(context)
Create a new instance of the AnnotationContext archetype.
| PARAMETER | DESCRIPTION |
|---|---|
context
|
List of class descriptions, mapping class indices to class names, colors etc.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a AnnotationContext.
def columns(*, context=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
context
|
List of class descriptions, mapping class indices to class names, colors etc.
TYPE:
|
def from_fields(*, clear_unset=False, context=None)
classmethod
Update only some specific fields of a AnnotationContext.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
context
|
List of class descriptions, mapping class indices to class names, colors etc.
TYPE:
|
class Arrows2D
Bases: Arrows2DExt, Archetype, VisualizableArchetype
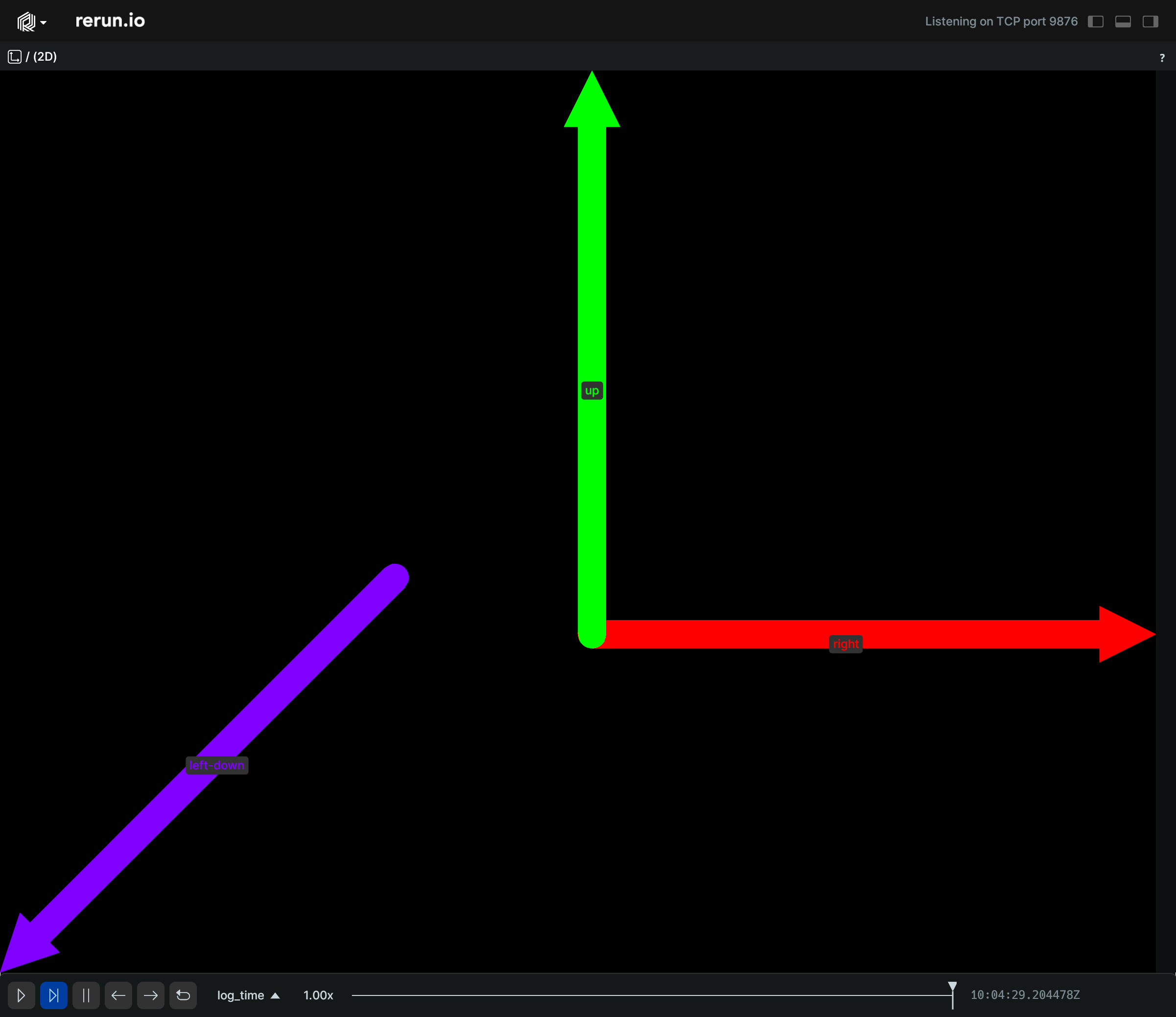
Archetype: 2D arrows with optional colors, radii, labels, etc.
Example
Simple batch of 2D arrows:
import rerun as rr
rr.init("rerun_example_arrow2d", spawn=True)
rr.log(
"arrows",
rr.Arrows2D(
origins=[[0.25, 0.0], [0.25, 0.0], [-0.1, -0.1]],
vectors=[[1.0, 0.0], [0.0, -1.0], [-0.7, 0.7]],
colors=[[255, 0, 0], [0, 255, 0], [127, 0, 255]],
labels=["right", "up", "left-down"],
radii=0.025,
),
)
def __init__(*, vectors, origins=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
Create a new instance of the Arrows2D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin points for each arrow in the batch. If no origins are set, (0, 0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order of the arrows. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
class_ids
|
Optional class Ids for the points. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Arrows2D.
def columns(*, vectors=None, origins=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin (base) positions for each arrow in the batch. If no origins are set, (0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def from_fields(*, clear_unset=False, vectors=None, origins=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Update only some specific fields of a Arrows2D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin (base) positions for each arrow in the batch. If no origins are set, (0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Arrows3D
Bases: Arrows3DExt, Archetype, VisualizableArchetype
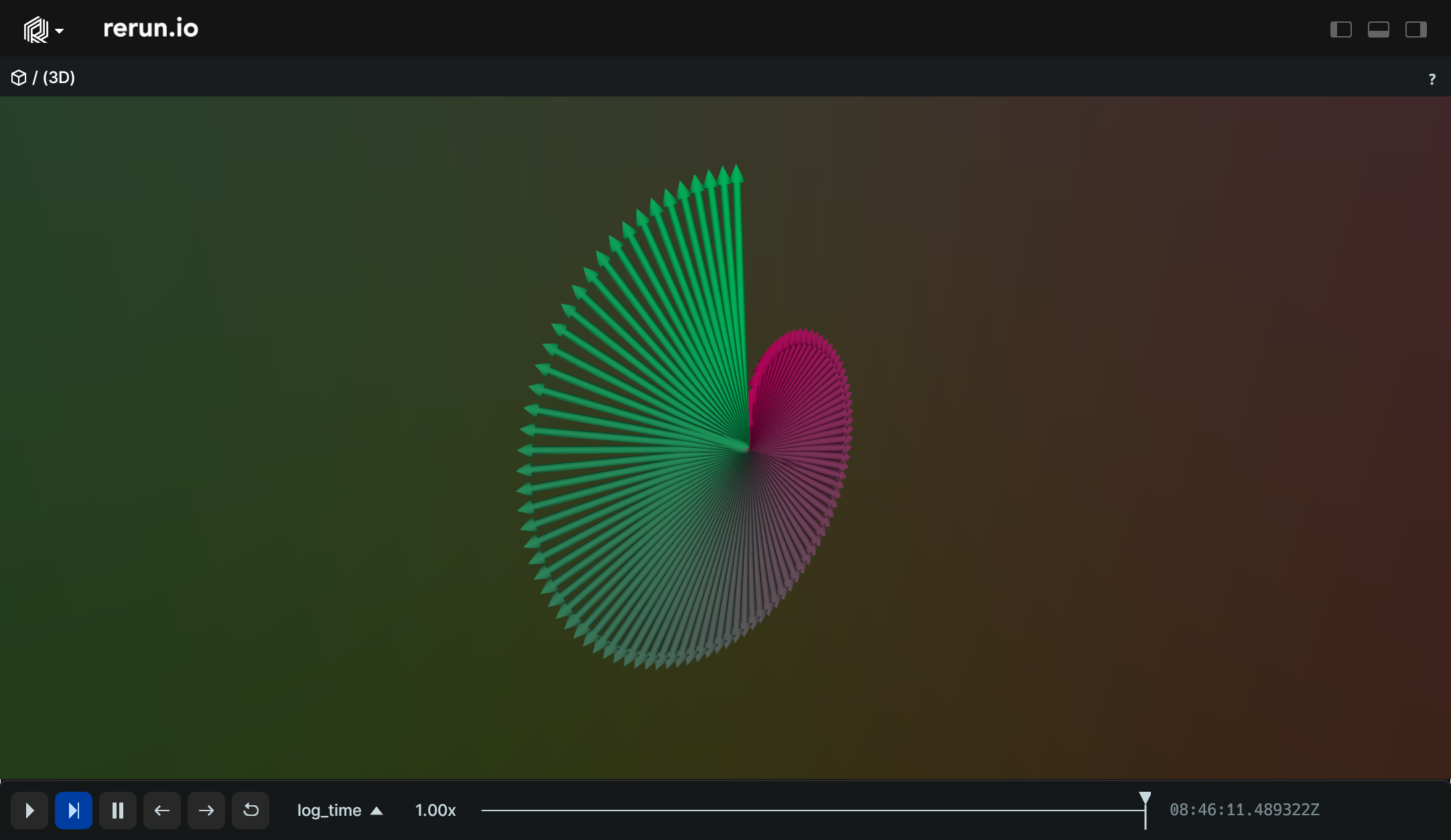
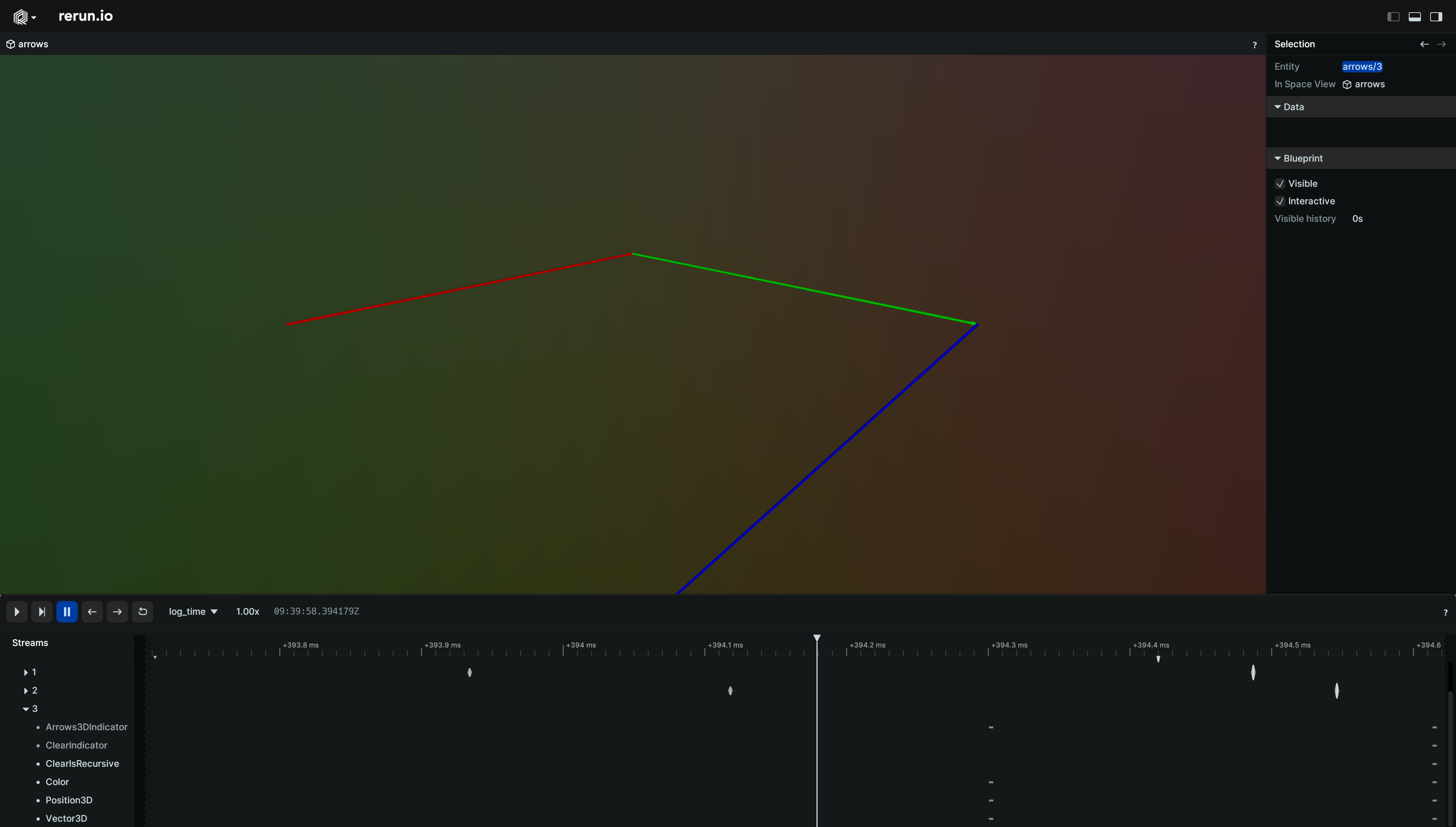
Archetype: 3D arrows with optional colors, radii, labels, etc.
Example
Simple batch of 3D arrows:
from math import tau
import numpy as np
import rerun as rr
rr.init("rerun_example_arrow3d", spawn=True)
lengths = np.log2(np.arange(0, 100) + 1)
angles = np.arange(start=0, stop=tau, step=tau * 0.01)
origins = np.zeros((100, 3))
vectors = np.column_stack([np.sin(angles) * lengths, np.zeros(100), np.cos(angles) * lengths])
colors = [[1.0 - c, c, 0.5, 0.5] for c in angles / tau]
rr.log("arrows", rr.Arrows3D(origins=origins, vectors=vectors, colors=colors))
def __init__(*, vectors, origins=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the Arrows3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin points for each arrow in the batch. If no origins are set, (0, 0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional class Ids for the points. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Arrows3D.
def columns(*, vectors=None, origins=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin (base) positions for each arrow in the batch. If no origins are set, (0, 0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def from_fields(*, clear_unset=False, vectors=None, origins=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a Arrows3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
vectors
|
All the vectors for each arrow in the batch.
TYPE:
|
origins
|
All the origin (base) positions for each arrow in the batch. If no origins are set, (0, 0, 0) is used as the origin for each arrow.
TYPE:
|
radii
|
Optional radii for the arrows. The shaft is rendered as a line with
TYPE:
|
colors
|
Optional colors for the points.
TYPE:
|
labels
|
Optional text labels for the arrows. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Asset3D
Bases: Asset3DExt, Archetype, VisualizableArchetype
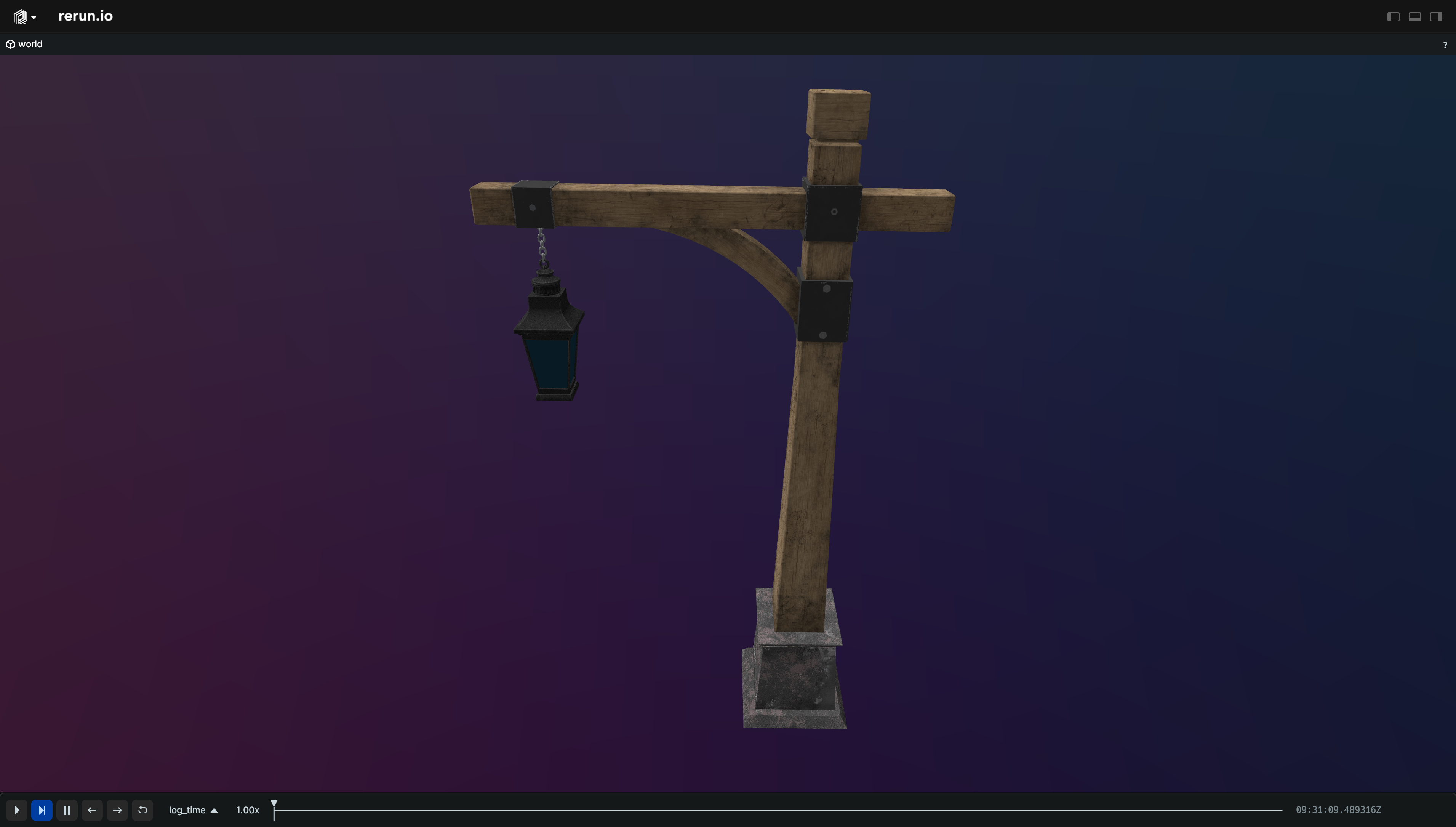
Archetype: A prepacked 3D asset (.gltf, .glb, .obj, .stl, etc.).
See also archetypes.Mesh3D.
If there are multiple archetypes.InstancePoses3D instances logged to the same entity as a mesh,
an instance of the mesh will be drawn for each transform.
Example
Simple 3D asset:
import sys
import rerun as rr
if len(sys.argv) < 2:
print(f"Usage: {sys.argv[0]} <path_to_asset.[gltf|glb|obj|stl]>")
sys.exit(1)
rr.init("rerun_example_asset3d", spawn=True)
rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, static=True) # Set an up-axis
rr.log("world/asset", rr.Asset3D(path=sys.argv[1]))
def __init__(*, path=None, contents=None, media_type=None, albedo_factor=None)
Create a new instance of the Asset3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
path
|
A path to an file stored on the local filesystem. Mutually
exclusive with |
contents
|
The contents of the file. Can be a BufferedReader, BytesIO, or
bytes. Mutually exclusive with
TYPE:
|
media_type
|
The Media Type of the asset. For instance:
* If omitted, it will be guessed from the
TYPE:
|
albedo_factor
|
Optional color multiplier for the whole mesh
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Asset3D.
def columns(*, blob=None, media_type=None, albedo_factor=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
blob
|
The asset's bytes.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
albedo_factor
|
A color multiplier applied to the whole asset. For mesh who already have
TYPE:
|
def from_fields(*, clear_unset=False, blob=None, media_type=None, albedo_factor=None)
classmethod
Update only some specific fields of a Asset3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
blob
|
The asset's bytes.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
albedo_factor
|
A color multiplier applied to the whole asset. For mesh who already have
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class AssetVideo
Bases: AssetVideoExt, Archetype
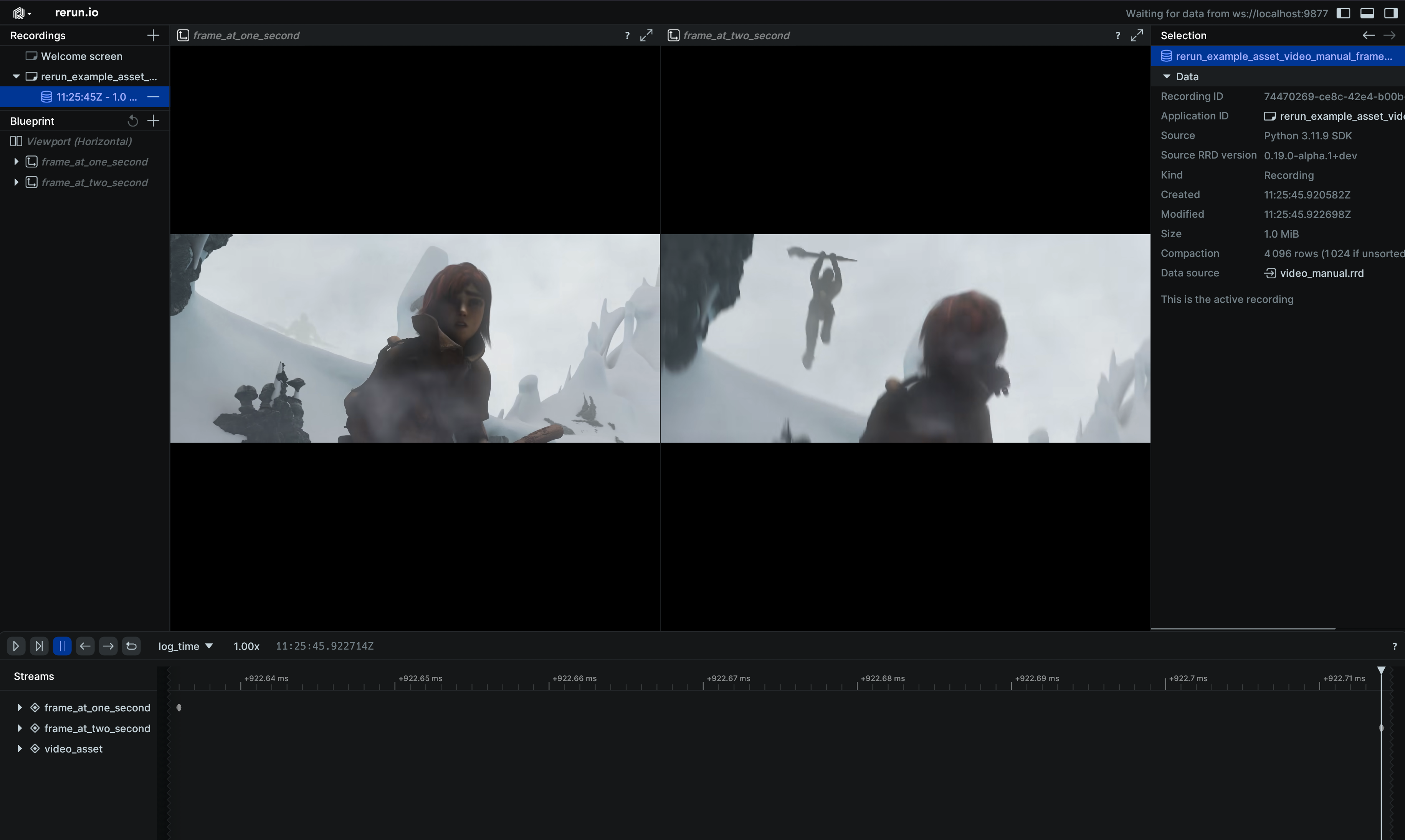
Archetype: A video binary.
Only MP4 containers are currently supported.
See https://rerun.io/docs/reference/video for codec support and more general information.
In order to display a video, you also need to log a archetypes.VideoFrameReference for each frame.
Examples:
Video with automatically determined frames:
import sys
import rerun as rr
if len(sys.argv) < 2:
# TODO(#7354): Only mp4 is supported for now.
print(f"Usage: {sys.argv[0]} <path_to_video.[mp4]>")
sys.exit(1)
rr.init("rerun_example_asset_video_auto_frames", spawn=True)
# Log video asset which is referred to by frame references.
video_asset = rr.AssetVideo(path=sys.argv[1])
rr.log("video", video_asset, static=True)
# Send automatically determined video frame timestamps.
frame_timestamps_ns = video_asset.read_frame_timestamps_nanos()
rr.send_columns(
"video",
# Note timeline values don't have to be the same as the video timestamps.
indexes=[rr.TimeColumn("video_time", duration=1e-9 * frame_timestamps_ns)],
columns=rr.VideoFrameReference.columns_nanos(frame_timestamps_ns),
)

Demonstrates manual use of video frame references:
import sys
import rerun as rr
import rerun.blueprint as rrb
if len(sys.argv) < 2:
# TODO(#7354): Only mp4 is supported for now.
print(f"Usage: {sys.argv[0]} <path_to_video.[mp4]>")
sys.exit(1)
rr.init("rerun_example_asset_video_manual_frames", spawn=True)
# Log video asset which is referred to by frame references.
rr.log("video_asset", rr.AssetVideo(path=sys.argv[1]), static=True)
# Create two entities, showing the same video frozen at different times.
rr.log(
"frame_1s",
rr.VideoFrameReference(seconds=1.0, video_reference="video_asset"),
)
rr.log(
"frame_2s",
rr.VideoFrameReference(seconds=2.0, video_reference="video_asset"),
)
# Send blueprint that shows two 2D views next to each other.
rr.send_blueprint(rrb.Horizontal(rrb.Spatial2DView(origin="frame_1s"), rrb.Spatial2DView(origin="frame_2s")))
def __init__(*, path=None, contents=None, media_type=None)
Create a new instance of the AssetVideo archetype.
| PARAMETER | DESCRIPTION |
|---|---|
path
|
A path to an file stored on the local filesystem. Mutually
exclusive with |
contents
|
The contents of the file. Can be a BufferedReader, BytesIO, or
bytes. Mutually exclusive with
TYPE:
|
media_type
|
The Media Type of the asset. For instance:
* If omitted, it will be guessed from the
TYPE:
|
def cleared()
classmethod
Clear all the fields of a AssetVideo.
def columns(*, blob=None, media_type=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
blob
|
The asset's bytes.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
def from_fields(*, clear_unset=False, blob=None, media_type=None)
classmethod
Update only some specific fields of a AssetVideo.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
blob
|
The asset's bytes.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
def read_frame_timestamps_nanos()
Determines the presentation timestamps of all frames inside the video.
Throws a runtime exception if the video cannot be read.
class BarChart
Bases: BarChartExt, Archetype, VisualizableArchetype
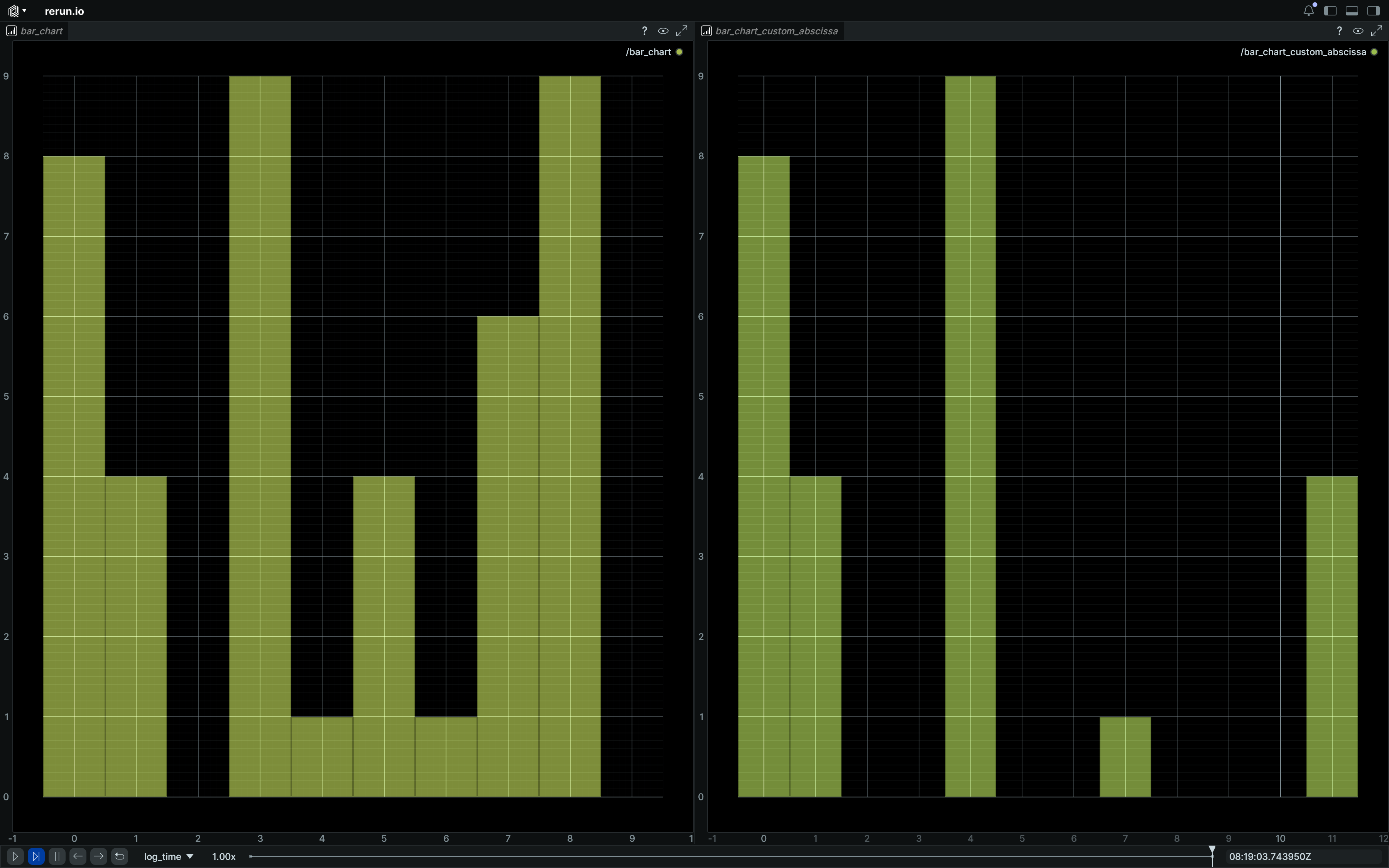
Archetype: A bar chart.
The bar heights will be the provided values, and the x coordinates of the bars will be the provided abscissa or default to the index of the provided values.
Example
Simple bar chart:
import rerun as rr
rr.init("rerun_example_bar_chart", spawn=True)
rr.log("bar_chart", rr.BarChart([8, 4, 0, 9, 1, 4, 1, 6, 9, 0]))
rr.log("bar_chart_custom_abscissa", rr.BarChart([8, 4, 0, 9, 1, 4], abscissa=[0, 1, 3, 4, 7, 11]))
rr.log(
"bar_chart_custom_abscissa_and_widths",
rr.BarChart([8, 4, 0, 9, 1, 4], abscissa=[0, 1, 3, 4, 7, 11], widths=[1, 2, 1, 3, 4, 1]),
)
def __init__(values, *, color=None, abscissa=None, widths=None)
Create a new instance of the BarChart archetype.
| PARAMETER | DESCRIPTION |
|---|---|
values
|
The values. Should always be a 1-dimensional tensor (i.e. a vector).
TYPE:
|
color
|
The color of the bar chart
TYPE:
|
abscissa
|
The abscissa corresponding to each value. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
widths
|
The width of the bins, defined in x-axis units and defaults to 1. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a BarChart.
def columns(*, values=None, color=None, abscissa=None, widths=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
values
|
The values. Should always be a 1-dimensional tensor (i.e. a vector).
TYPE:
|
color
|
The color of the bar chart
TYPE:
|
abscissa
|
The abscissa corresponding to each value. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
widths
|
The width of the bins, defined in x-axis units and defaults to 1. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
def from_fields(*, clear_unset=False, values=None, color=None, abscissa=None, widths=None)
classmethod
Update only some specific fields of a BarChart.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
values
|
The values. Should always be a 1-dimensional tensor (i.e. a vector).
TYPE:
|
color
|
The color of the bar chart
TYPE:
|
abscissa
|
The abscissa corresponding to each value. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
widths
|
The width of the bins, defined in x-axis units and defaults to 1. Should be a 1-dimensional tensor (i.e. a vector) in same length as values.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Boxes2D
Bases: Boxes2DExt, Archetype, VisualizableArchetype
Archetype: 2D boxes with half-extents and optional center, colors etc.
Example
Simple 2D boxes:
import rerun as rr
rr.init("rerun_example_box2d", spawn=True)
rr.log("simple", rr.Boxes2D(mins=[-1, -1], sizes=[2, 2]))
def __init__(*, sizes=None, mins=None, half_sizes=None, centers=None, array=None, array_format=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
Create a new instance of the Boxes2D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
sizes
|
Full extents in x/y.
Incompatible with
TYPE:
|
half_sizes
|
All half-extents that make up the batch of boxes. Specify this instead of
TYPE:
|
mins
|
Minimum coordinates of the boxes. Specify this instead of
TYPE:
|
array
|
An array of boxes in the format specified by
TYPE:
|
array_format
|
How to interpret the data in
TYPE:
|
centers
|
Optional center positions of the boxes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
labels
|
Optional text labels for the boxes.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values. The default for 2D boxes is 10.0.
TYPE:
|
class_ids
|
Optional The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Boxes2D.
def columns(*, half_sizes=None, centers=None, colors=None, radii=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
half_sizes
|
All half-extents that make up the batch of boxes.
TYPE:
|
centers
|
Optional center positions of the boxes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
labels
|
Optional text labels for the boxes. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def from_fields(*, clear_unset=False, half_sizes=None, centers=None, colors=None, radii=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Update only some specific fields of a Boxes2D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
half_sizes
|
All half-extents that make up the batch of boxes.
TYPE:
|
centers
|
Optional center positions of the boxes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
labels
|
Optional text labels for the boxes. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Boxes3D
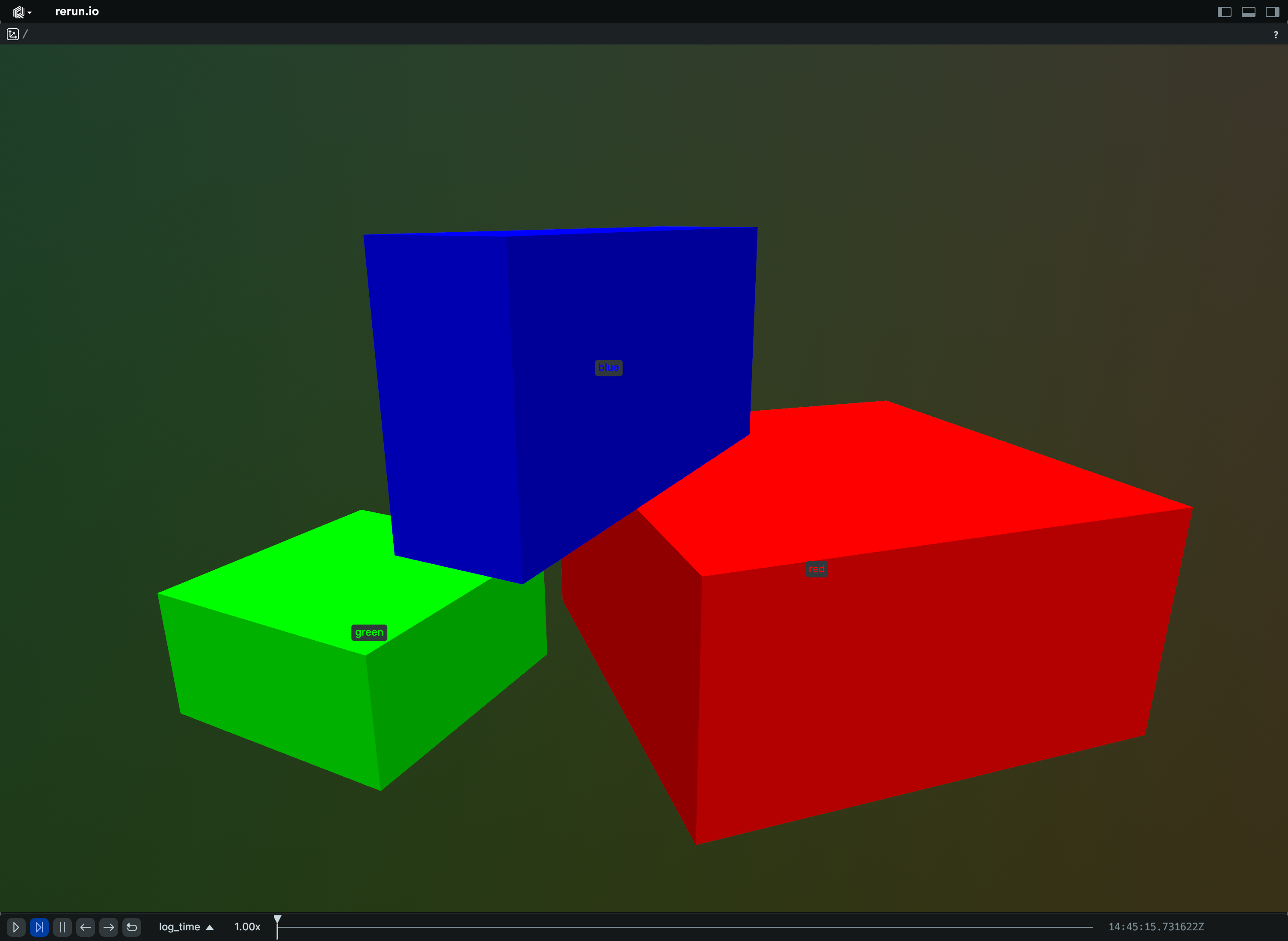
Bases: Boxes3DExt, Archetype, VisualizableArchetype
Archetype: 3D boxes with half-extents and optional center, rotations, colors etc.
If there's more instance poses than half sizes, the last box's orientation will be repeated for the remaining poses.
Orienting and placing boxes forms a separate transform that is applied prior to archetypes.InstancePoses3D and archetypes.Transform3D.
Example
Batch of 3D boxes:
import rerun as rr
rr.init("rerun_example_box3d_batch", spawn=True)
rr.log(
"batch",
rr.Boxes3D(
centers=[[2, 0, 0], [-2, 0, 0], [0, 0, 2]],
half_sizes=[[2.0, 2.0, 1.0], [1.0, 1.0, 0.5], [2.0, 0.5, 1.0]],
quaternions=[
rr.Quaternion.identity(),
rr.Quaternion(xyzw=[0.0, 0.0, 0.382683, 0.923880]), # 45 degrees around Z
],
radii=0.025,
colors=[(255, 0, 0), (0, 255, 0), (0, 0, 255)],
fill_mode="solid",
labels=["red", "green", "blue"],
),
)
def __init__(*, sizes=None, mins=None, half_sizes=None, centers=None, rotation_axis_angles=None, quaternions=None, rotations=None, colors=None, radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the Boxes3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
sizes
|
Full extents in x/y/z. Specify this instead of
TYPE:
|
half_sizes
|
All half-extents that make up the batch of boxes. Specify this instead of
TYPE:
|
mins
|
Minimum coordinates of the boxes. Specify this instead of Only valid when used together with either
TYPE:
|
centers
|
Optional center positions of the boxes. If not specified, the centers will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
rotations
|
Backwards compatible parameter for specifying rotations. Tries to infer the type of rotation from the input. Prefer using
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
fill_mode
|
Optionally choose whether the boxes are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the boxes.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Boxes3D.
def columns(*, half_sizes=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
half_sizes
|
All half-extents that make up the batch of boxes.
TYPE:
|
centers
|
Optional center positions of the boxes. If not specified, the centers will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the boxes. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
fill_mode
|
Optionally choose whether the boxes are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the boxes. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def from_fields(*, clear_unset=False, half_sizes=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a Boxes3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
half_sizes
|
All half-extents that make up the batch of boxes.
TYPE:
|
centers
|
Optional center positions of the boxes. If not specified, the centers will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the boxes. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
radii
|
Optional radii for the lines that make up the boxes.
TYPE:
|
fill_mode
|
Optionally choose whether the boxes are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the boxes. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Capsules3D
Bases: Capsules3DExt, Archetype, VisualizableArchetype
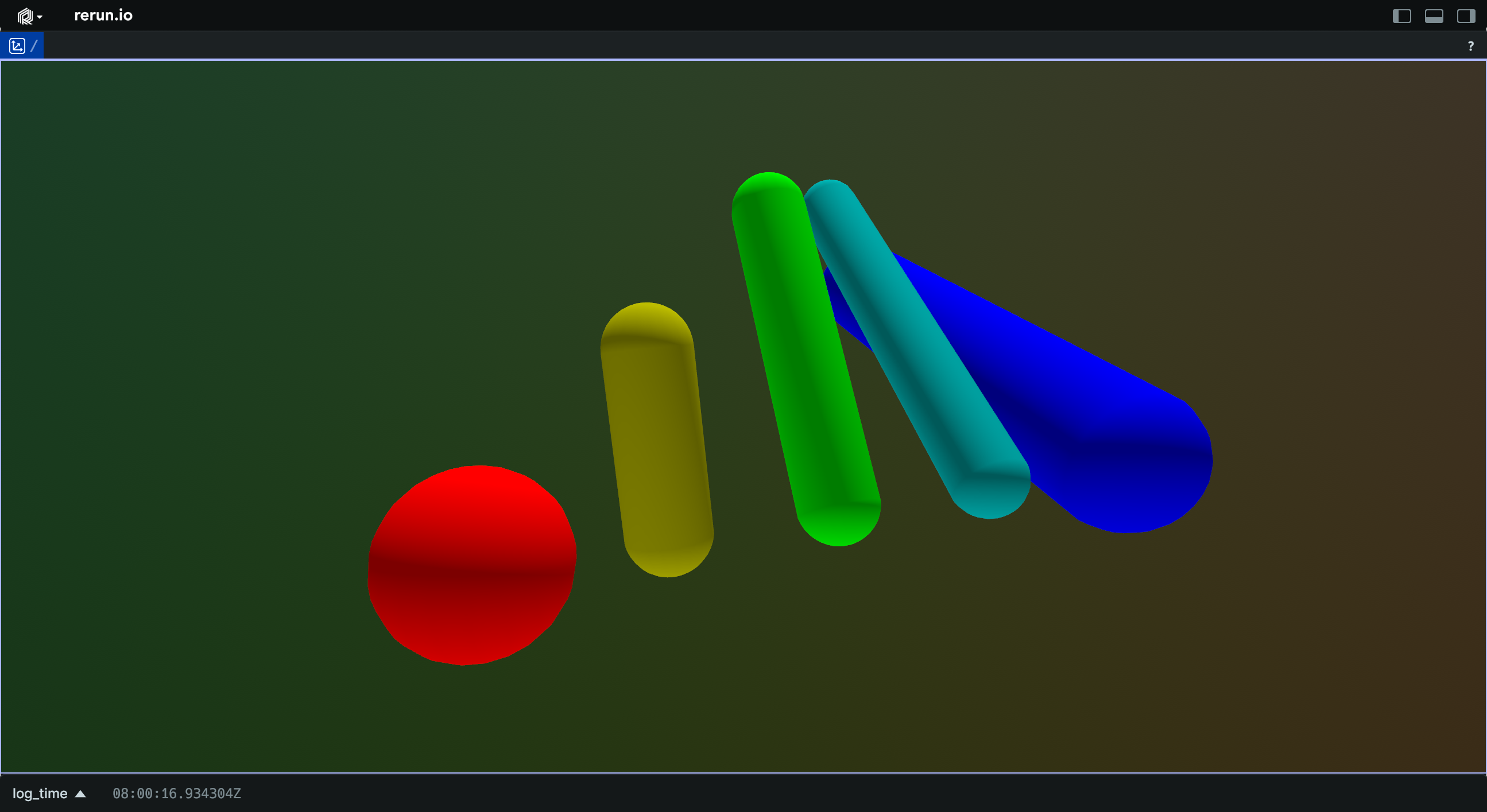
Archetype: 3D capsules; cylinders with hemispherical caps.
Capsules are defined by two endpoints (the centers of their end cap spheres), which are located at (0, 0, 0) and (0, 0, length), that is, extending along the positive direction of the Z axis. Capsules in other orientations may be produced by applying a rotation to the entity or instances.
If there's more instance poses than lengths & radii, the last capsule's orientation will be repeated for the remaining poses.
Orienting and placing capsules forms a separate transform that is applied prior to archetypes.InstancePoses3D and archetypes.Transform3D.
Example
Batch of capsules:
import rerun as rr
rr.init("rerun_example_capsule3d_batch", spawn=True)
rr.log(
"capsules",
rr.Capsules3D(
lengths=[0.0, 2.0, 4.0, 6.0, 8.0],
radii=[1.0, 0.5, 0.5, 0.5, 1.0],
colors=[
(255, 0, 0),
(188, 188, 0),
(0, 255, 0),
(0, 188, 188),
(0, 0, 255),
],
translations=[
(0.0, 0.0, 0.0),
(2.0, 0.0, 0.0),
(4.0, 0.0, 0.0),
(6.0, 0.0, 0.0),
(8.0, 0.0, 0.0),
],
rotation_axis_angles=[
rr.RotationAxisAngle(
[1.0, 0.0, 0.0],
rr.Angle(deg=float(i) * -22.5),
)
for i in range(5)
],
),
)
def __init__(*, lengths=None, radii=None, translations=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the Capsules3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
lengths
|
All lengths of the capsules.
TYPE:
|
radii
|
All radii of the capsules.
TYPE:
|
translations
|
Optional translations of the capsules. If not specified, one end of each capsule will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the capsules.
TYPE:
|
line_radii
|
Optional radii for the lines used when the cylinder is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the capsules.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Capsules3D.
def columns(*, lengths=None, radii=None, translations=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
lengths
|
Lengths of the capsules, defined as the distance between the centers of the endcaps.
TYPE:
|
radii
|
Radii of the capsules.
TYPE:
|
translations
|
Optional translations of the capsules. If not specified, one end of each capsule will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the capsules. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the cylinder is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the capsules, which will be located at their centers.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def from_fields(*, clear_unset=False, lengths=None, radii=None, translations=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a Capsules3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
lengths
|
Lengths of the capsules, defined as the distance between the centers of the endcaps.
TYPE:
|
radii
|
Radii of the capsules.
TYPE:
|
translations
|
Optional translations of the capsules. If not specified, one end of each capsule will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the capsules. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the cylinder is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the capsules, which will be located at their centers.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Clear
Bases: ClearExt, Archetype
Archetype: Empties all the components of an entity.
The presence of a clear means that a latest-at query of components at a given path(s) will not return any components that were logged at those paths before the clear. Any logged components after the clear are unaffected by the clear.
This implies that a range query that includes time points that are before the clear, still returns all components at the given path(s). Meaning that in practice clears are ineffective when making use of visible time ranges. Scalar plots are an exception: they track clears and use them to represent holes in the data (i.e. discontinuous lines).
Example
Flat:
import rerun as rr
rr.init("rerun_example_clear", spawn=True)
vectors = [(1.0, 0.0, 0.0), (0.0, -1.0, 0.0), (-1.0, 0.0, 0.0), (0.0, 1.0, 0.0)]
origins = [(-0.5, 0.5, 0.0), (0.5, 0.5, 0.0), (0.5, -0.5, 0.0), (-0.5, -0.5, 0.0)]
colors = [(200, 0, 0), (0, 200, 0), (0, 0, 200), (200, 0, 200)]
# Log a handful of arrows.
for i, (vector, origin, color) in enumerate(zip(vectors, origins, colors, strict=False)):
rr.log(f"arrows/{i}", rr.Arrows3D(vectors=vector, origins=origin, colors=color))
# Now clear them, one by one on each tick.
for i in range(len(vectors)):
rr.log(f"arrows/{i}", rr.Clear(recursive=False)) # or `rr.Clear.flat()`
def __init__(*, recursive)
Create a new instance of the Clear archetype.
| PARAMETER | DESCRIPTION |
|---|---|
recursive
|
Whether to recursively clear all children.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Clear.
def columns(*, is_recursive=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
def flat()
staticmethod
Returns a non-recursive clear archetype.
This will empty all components of the associated entity at the logged timepoint. Children will be left untouched.
def from_fields(*, clear_unset=False, is_recursive=None)
classmethod
Update only some specific fields of a Clear.
def recursive()
staticmethod
Returns a recursive clear archetype.
This will empty all components of the associated entity at the logged timepoint, as well as all components of all its recursive children.
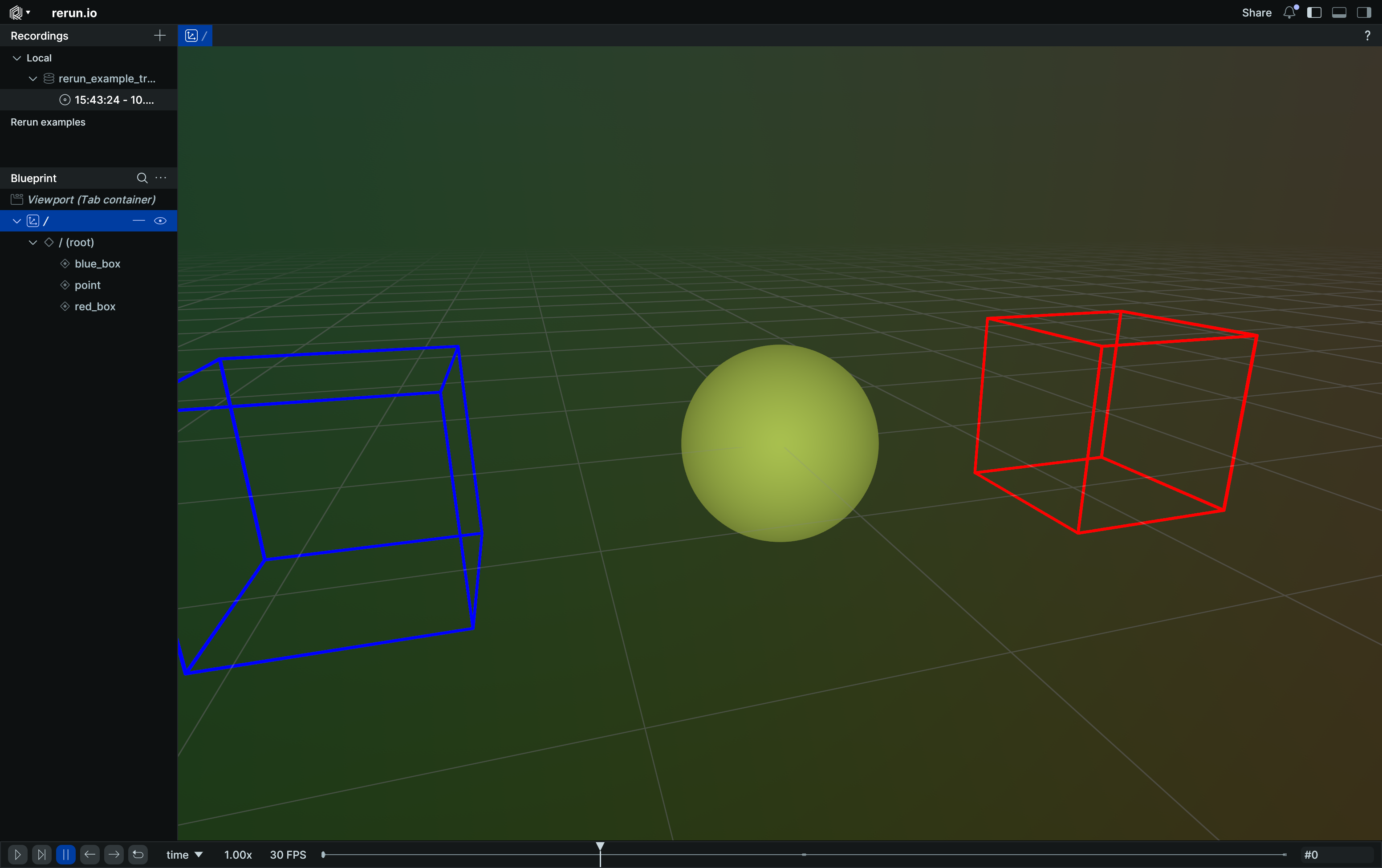
class CoordinateFrame
Bases: Archetype
Archetype: Specifies the coordinate frame for an entity.
If not specified, the coordinate frame uses an implicit frame derived from the entity path.
The implicit frame's name is tf#/your/entity/path and has an identity transform connection to its parent path.
To learn more about transforms see Spaces & Transforms in the reference.
Example
Change coordinate frame to different built-in frames:
import rerun as rr
rr.init("rerun_example_transform3d_hierarchy", spawn=True)
rr.set_time("time", sequence=0)
rr.log(
"red_box",
rr.Boxes3D(half_sizes=[0.5, 0.5, 0.5], colors=[255, 0, 0]),
# Use Transform3D to place the box, so we actually change the underlying coordinate frame and not just the box's pose.
rr.Transform3D(translation=[2.0, 0.0, 0.0]),
)
rr.log(
"blue_box",
rr.Boxes3D(half_sizes=[0.5, 0.5, 0.5], colors=[0, 0, 255]),
# Use Transform3D to place the box, so we actually change the underlying coordinate frame and not just the box's pose.
rr.Transform3D(translation=[-2.0, 0.0, 0.0]),
)
rr.log("point", rr.Points3D([0.0, 0.0, 0.0], radii=0.5))
# Change where the point is located by cycling through its coordinate frame.
for t, frame_id in enumerate(["tf#/red_box", "tf#/blue_box"]):
rr.set_time("time", sequence=t + 1) # leave it untouched at t==0.
rr.log("point", rr.CoordinateFrame(frame_id))
def __init__(frame)
Create a new instance of the CoordinateFrame archetype.
| PARAMETER | DESCRIPTION |
|---|---|
frame
|
The coordinate frame to use for the current entity. Note that empty strings are not valid transform frame IDs.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a CoordinateFrame.
def columns(*, frame=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
frame
|
The coordinate frame to use for the current entity. Note that empty strings are not valid transform frame IDs.
TYPE:
|
def from_fields(*, clear_unset=False, frame=None)
classmethod
Update only some specific fields of a CoordinateFrame.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
frame
|
The coordinate frame to use for the current entity. Note that empty strings are not valid transform frame IDs.
TYPE:
|
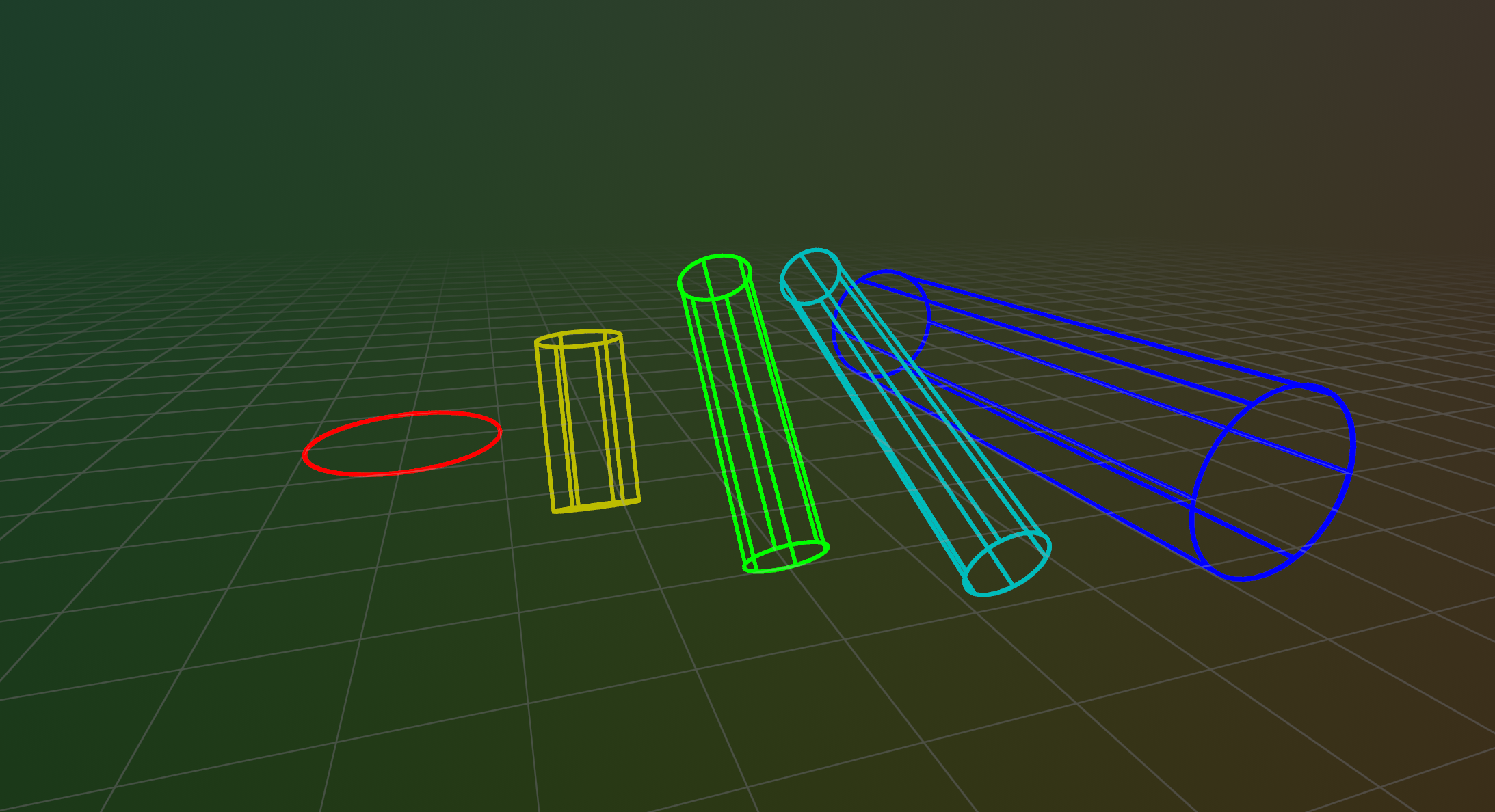
class Cylinders3D
Bases: Cylinders3DExt, Archetype, VisualizableArchetype
Archetype: 3D cylinders with flat caps.
This archetype is for cylinder primitives defined by their axial length and radius.
For points whose radii are for visualization purposes, use archetypes.Points3D instead.
Orienting and placing cylinders forms a separate transform that is applied prior to archetypes.InstancePoses3D and archetypes.Transform3D.
Example
Batch of cylinders:
import rerun as rr
rr.init("rerun_example_cylinders3d_batch", spawn=True)
rr.log(
"cylinders",
rr.Cylinders3D(
lengths=[0.0, 2.0, 4.0, 6.0, 8.0],
radii=[1.0, 0.5, 0.5, 0.5, 1.0],
colors=[
(255, 0, 0),
(188, 188, 0),
(0, 255, 0),
(0, 188, 188),
(0, 0, 255),
],
centers=[
(0.0, 0.0, 0.0),
(2.0, 0.0, 0.0),
(4.0, 0.0, 0.0),
(6.0, 0.0, 0.0),
(8.0, 0.0, 0.0),
],
rotation_axis_angles=[
rr.RotationAxisAngle(
[1.0, 0.0, 0.0],
rr.Angle(deg=float(i) * -22.5),
)
for i in range(5)
],
),
)
def __init__(*, lengths=None, radii=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the Cylinders3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
lengths
|
All lengths of the cylinders.
TYPE:
|
radii
|
All radii of the cylinders.
TYPE:
|
centers
|
Optional centers of the cylinders. If not specified, each cylinder will be centered at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the cylinders.
TYPE:
|
line_radii
|
Optional radii for the lines that make up the cylinders.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the cylinders.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Cylinders3D.
def columns(*, lengths=None, radii=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
lengths
|
The total axial length of the cylinder, measured as the straight-line distance between the centers of its two endcaps.
TYPE:
|
radii
|
Radii of the cylinders.
TYPE:
|
centers
|
Optional centers of the cylinders. If not specified, each cylinder will be centered at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the cylinders. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the cylinder is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the cylinders, which will be located at their centers.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def from_fields(*, clear_unset=False, lengths=None, radii=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a Cylinders3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
lengths
|
The total axial length of the cylinder, measured as the straight-line distance between the centers of its two endcaps.
TYPE:
|
radii
|
Radii of the cylinders.
TYPE:
|
centers
|
Optional centers of the cylinders. If not specified, each cylinder will be centered at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the cylinders align with the +Z axis of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the cylinders. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the cylinder is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the cylinders are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the cylinders, which will be located at their centers.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
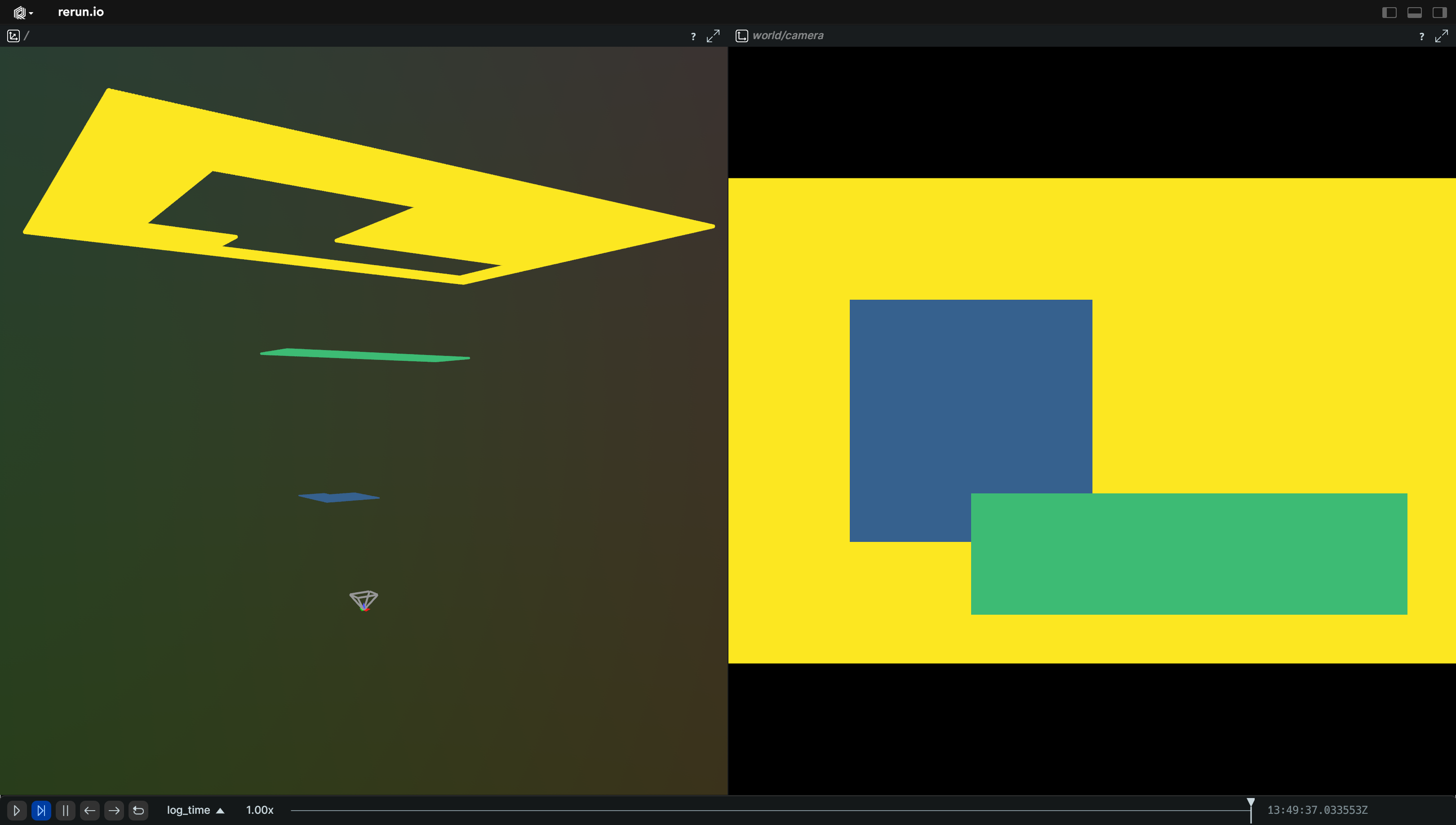
class DepthImage
Bases: DepthImageExt, Archetype, VisualizableArchetype
Archetype: A depth image, i.e. as captured by a depth camera.
Each pixel corresponds to a depth value in units specified by components.DepthMeter.
Example
Depth to 3D example:
import numpy as np
import rerun as rr
depth_image = 65535 * np.ones((200, 300), dtype=np.uint16)
depth_image[50:150, 50:150] = 20000
depth_image[130:180, 100:280] = 45000
rr.init("rerun_example_depth_image_3d", spawn=True)
# If we log a pinhole camera model, the depth gets automatically back-projected to 3D
rr.log(
"world/camera",
rr.Pinhole(
width=depth_image.shape[1],
height=depth_image.shape[0],
focal_length=200,
),
)
# Log the tensor.
rr.log("world/camera/depth", rr.DepthImage(depth_image, meter=10_000.0, colormap="viridis"))
def __init__(image, *, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
Create a new instance of the DepthImage archetype.
| PARAMETER | DESCRIPTION |
|---|---|
image
|
A numpy array or tensor with the depth image data.
Leading and trailing unit-dimensions are ignored, so that
TYPE:
|
meter
|
An optional floating point value that specifies how long a meter is in the native depth units. For instance: with uint16, perhaps meter=1000 which would mean you have millimeter precision and a range of up to ~65 meters (2^16 / 1000). Note that the only effect on 2D views is the physical depth values shown when hovering the image. In 3D views on the other hand, this affects where the points of the point cloud are placed.
TYPE:
|
colormap
|
Colormap to use for rendering the depth image. If not set, the depth image will be rendered using the Turbo colormap.
TYPE:
|
depth_range
|
The expected range of depth values. This is typically the expected range of valid values. Everything outside of the range is clamped to the range for the purpose of colormpaping. Note that point clouds generated from this image will still display all points, regardless of this range. If not specified, the range will be automatically be estimated from the data. Note that the Viewer may try to guess a wider range than the minimum/maximum of values in the contents of the depth image. E.g. if all values are positive, some bigger than 1.0 and all smaller than 255.0, the Viewer will guess that the data likely came from an 8bit image, thus assuming a range of 0-255.
TYPE:
|
point_fill_ratio
|
Scale the radii of the points in the point cloud generated from this image. A fill ratio of 1.0 (the default) means that each point is as big as to touch the center of its neighbor if it is at the same depth, leaving no gaps. A fill ratio of 0.5 means that each point touches the edge of its neighbor if it has the same depth. TODO(#6744): This applies only to 3D views!
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order, used only if the depth image is shown as a 2D image. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views.
TYPE:
|
def as_pil_image()
Convert the depth image to a PIL Image.
def cleared()
classmethod
Clear all the fields of a DepthImage.
def columns(*, buffer=None, format=None, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
buffer
|
The raw depth image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
meter
|
An optional floating point value that specifies how long a meter is in the native depth units. For instance: with uint16, perhaps meter=1000 which would mean you have millimeter precision and a range of up to ~65 meters (2^16 / 1000). If omitted, the Viewer defaults to Note that the only effect on 2D views is the physical depth values shown when hovering the image. In 3D views on the other hand, this affects where the points of the point cloud are placed.
TYPE:
|
colormap
|
Colormap to use for rendering the depth image. If not set, the depth image will be rendered using the Turbo colormap.
TYPE:
|
depth_range
|
The expected range of depth values. This is typically the expected range of valid values. Everything outside of the range is clamped to the range for the purpose of colormpaping. Note that point clouds generated from this image will still display all points, regardless of this range. If not specified, the range will be automatically estimated from the data. Note that the Viewer may try to guess a wider range than the minimum/maximum of values in the contents of the depth image. E.g. if all values are positive, some bigger than 1.0 and all smaller than 255.0, the Viewer will guess that the data likely came from an 8bit image, thus assuming a range of 0-255.
TYPE:
|
point_fill_ratio
|
Scale the radii of the points in the point cloud generated from this image. A fill ratio of 1.0 (the default) means that each point is as big as to touch the center of its neighbor if it is at the same depth, leaving no gaps. A fill ratio of 0.5 means that each point touches the edge of its neighbor if it has the same depth. TODO(#6744): This applies only to 3D views!
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order, used only if the depth image is shown as a 2D image. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views. The filter is applied to the scalar values before they are mapped to color via the colormap. Has no effect in 3D views.
TYPE:
|
def compress(compress_level=6)
Compress the given depth image as a PNG.
PNG compression is lossless. Only U8 and U16 depth images are supported, as these are the only single-channel types the Rerun Viewer can decode from encoded depth PNGs.
Note that compressing to PNG costs a bit of CPU time, both when logging and later when viewing them.
| PARAMETER | DESCRIPTION |
|---|---|
compress_level
|
PNG compression level, 0-9. Higher means smaller files but slower. 0 = no compression, 1 = fastest, 9 = smallest. Default is 6.
TYPE:
|
def from_fields(*, clear_unset=False, buffer=None, format=None, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
classmethod
Update only some specific fields of a DepthImage.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
buffer
|
The raw depth image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
meter
|
An optional floating point value that specifies how long a meter is in the native depth units. For instance: with uint16, perhaps meter=1000 which would mean you have millimeter precision and a range of up to ~65 meters (2^16 / 1000). If omitted, the Viewer defaults to Note that the only effect on 2D views is the physical depth values shown when hovering the image. In 3D views on the other hand, this affects where the points of the point cloud are placed.
TYPE:
|
colormap
|
Colormap to use for rendering the depth image. If not set, the depth image will be rendered using the Turbo colormap.
TYPE:
|
depth_range
|
The expected range of depth values. This is typically the expected range of valid values. Everything outside of the range is clamped to the range for the purpose of colormpaping. Note that point clouds generated from this image will still display all points, regardless of this range. If not specified, the range will be automatically estimated from the data. Note that the Viewer may try to guess a wider range than the minimum/maximum of values in the contents of the depth image. E.g. if all values are positive, some bigger than 1.0 and all smaller than 255.0, the Viewer will guess that the data likely came from an 8bit image, thus assuming a range of 0-255.
TYPE:
|
point_fill_ratio
|
Scale the radii of the points in the point cloud generated from this image. A fill ratio of 1.0 (the default) means that each point is as big as to touch the center of its neighbor if it is at the same depth, leaving no gaps. A fill ratio of 0.5 means that each point touches the edge of its neighbor if it has the same depth. TODO(#6744): This applies only to 3D views!
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order, used only if the depth image is shown as a 2D image. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views. The filter is applied to the scalar values before they are mapped to color via the colormap. Has no effect in 3D views.
TYPE:
|
def image_format()
Returns the image format of this depth image.
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
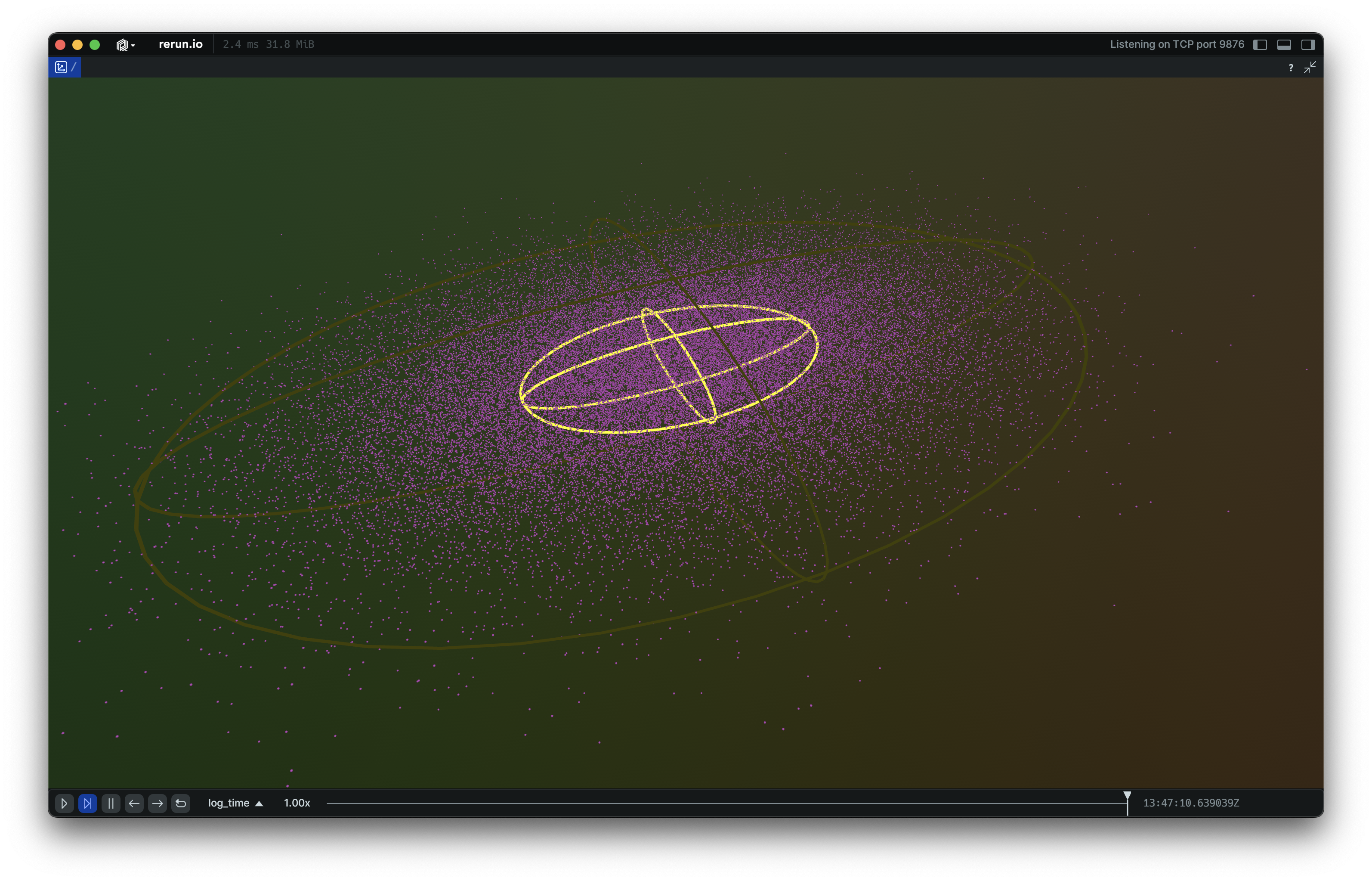
class Ellipsoids3D
Bases: Ellipsoids3DExt, Archetype, VisualizableArchetype
Archetype: 3D ellipsoids or spheres.
This archetype is for ellipsoids or spheres whose size is a key part of the data
(e.g. a bounding sphere).
For points whose radii are for the sake of visualization, use archetypes.Points3D instead.
If there's more instance poses than half sizes, the last ellipsoid/sphere's orientation will be repeated for the remaining poses.
Orienting and placing ellipsoids/spheres forms a separate transform that is applied prior to archetypes.InstancePoses3D and archetypes.Transform3D.
Example
Covariance ellipsoid:
import numpy as np
import rerun as rr
rr.init("rerun_example_ellipsoid_simple", spawn=True)
center = np.array([0, 0, 0])
sigmas = np.array([5, 3, 1])
points = np.random.randn(50_000, 3) * sigmas.reshape(1, -1)
rr.log("points", rr.Points3D(points, radii=0.02, colors=[188, 77, 185]))
rr.log(
"ellipsoid",
rr.Ellipsoids3D(
centers=[center, center],
half_sizes=[sigmas, 3 * sigmas],
colors=[[255, 255, 0], [64, 64, 0]],
),
)
def __init__(*, half_sizes=None, radii=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the Ellipsoids3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
half_sizes
|
All half-extents that make up the batch of ellipsoids.
Specify this instead of
TYPE:
|
radii
|
All radii that make up this batch of spheres.
Specify this instead of
TYPE:
|
centers
|
Optional center positions of the ellipsoids.
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the boxes align with the axes of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the ellipsoids.
TYPE:
|
line_radii
|
Optional radii for the lines that make up the ellipsoids.
TYPE:
|
fill_mode
|
Optionally choose whether the ellipsoids are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the ellipsoids.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Ellipsoids3D.
def columns(*, half_sizes=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
half_sizes
|
For each ellipsoid, half of its size on its three axes. If all components are equal, then it is a sphere with that radius.
TYPE:
|
centers
|
Optional center positions of the ellipsoids. If not specified, the centers will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the ellipsoid align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the ellipsoid align with the axes of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the ellipsoids. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the ellipsoid is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the ellipsoids are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the ellipsoids.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def from_fields(*, clear_unset=False, half_sizes=None, centers=None, rotation_axis_angles=None, quaternions=None, colors=None, line_radii=None, fill_mode=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a Ellipsoids3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
half_sizes
|
For each ellipsoid, half of its size on its three axes. If all components are equal, then it is a sphere with that radius.
TYPE:
|
centers
|
Optional center positions of the ellipsoids. If not specified, the centers will be at (0, 0, 0).
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle. If no rotation is specified, the axes of the ellipsoid align with the axes of the local coordinate system.
TYPE:
|
quaternions
|
Rotations via quaternion. If no rotation is specified, the axes of the ellipsoid align with the axes of the local coordinate system.
TYPE:
|
colors
|
Optional colors for the ellipsoids. Alpha channel is used for transparency for solid fill-mode.
TYPE:
|
line_radii
|
Optional radii for the lines used when the ellipsoid is rendered as a wireframe.
TYPE:
|
fill_mode
|
Optionally choose whether the ellipsoids are drawn with lines or solid.
TYPE:
|
labels
|
Optional text labels for the ellipsoids.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class ID for the ellipsoids. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class EncodedDepthImage
Bases: Archetype, VisualizableArchetype
Archetype: A depth image encoded with a codec (e.g. RVL or PNG).
Rerun also supports uncompressed depth images with the archetypes.DepthImage.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
Example
Encoded depth image:
import sys
from pathlib import Path
import rerun as rr
if len(sys.argv) < 2:
print(f"Usage: {sys.argv[0]} <path_to_depth_image.[png|rvl]>", file=sys.stderr)
sys.exit(1)
depth_path = Path(sys.argv[1])
rr.init("rerun_example_encoded_depth_image", spawn=True)
depth_png = depth_path.read_bytes()
if depth_path.suffix.lower() == ".png":
media_type = rr.components.MediaType.PNG
else:
media_type = rr.components.MediaType.RVL
rr.log(
"depth/encoded",
rr.EncodedDepthImage(
blob=depth_png,
media_type=media_type,
meter=0.001,
),
)
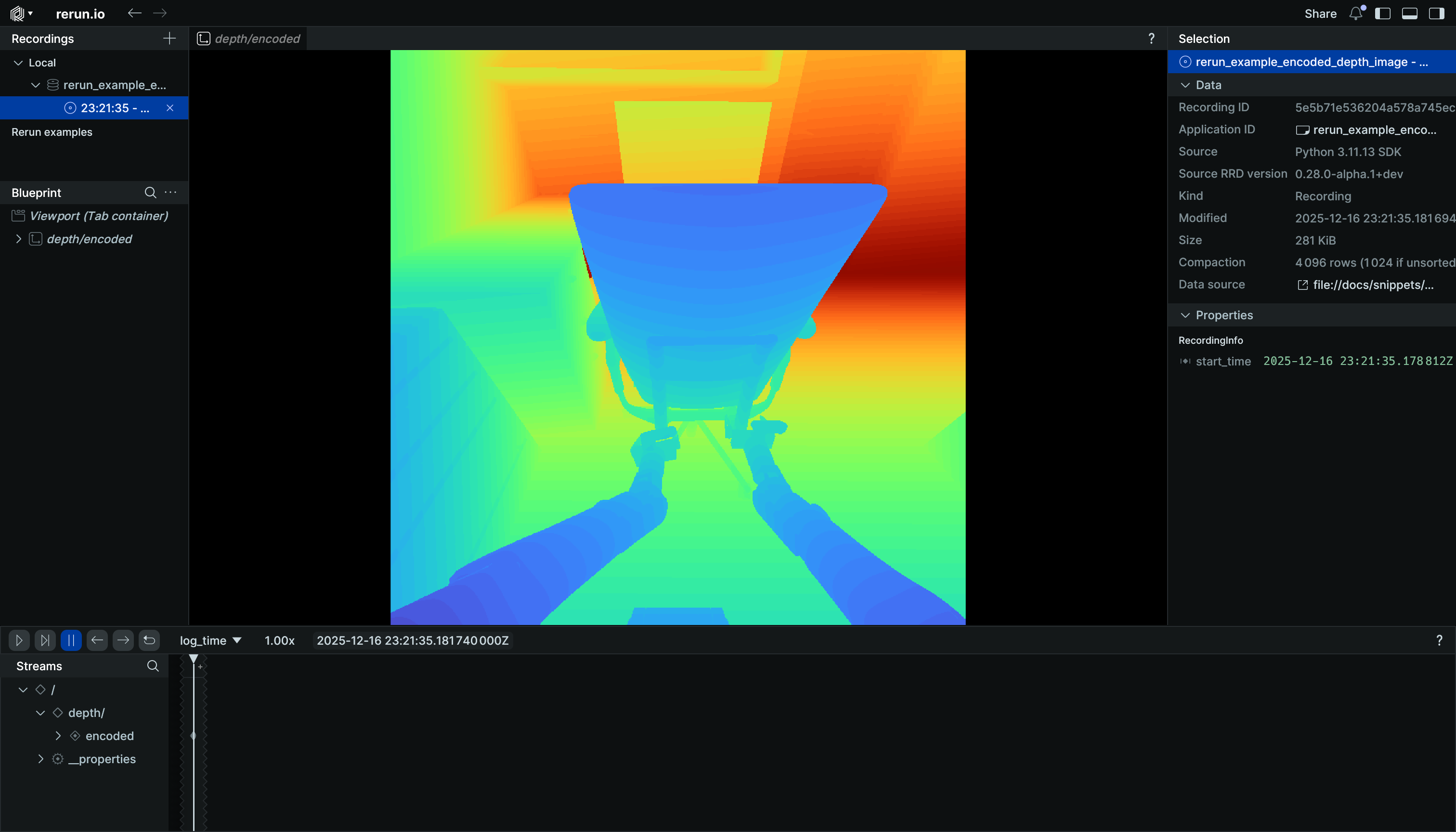
def __init__(blob, *, media_type=None, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
Create a new instance of the EncodedDepthImage archetype.
| PARAMETER | DESCRIPTION |
|---|---|
blob
|
The encoded depth payload. Supported are: * single channel PNG * RVL with ROS2 metadata (for details see https://github.com/ros-perception/image_transport_plugins/tree/jazzy)
TYPE:
|
media_type
|
Media type of the blob, e.g.:
TYPE:
|
meter
|
Conversion from native units to meters (e.g. If omitted, the Viewer defaults to
TYPE:
|
colormap
|
Optional colormap for visualization of decoded depth.
TYPE:
|
depth_range
|
Optional visualization range for depth values.
TYPE:
|
point_fill_ratio
|
Optional point fill ratio for point-cloud projection.
TYPE:
|
draw_order
|
Optional 2D draw order.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views. The filter is applied to the scalar values before they are mapped to color via the colormap. Has no effect in 3D views.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a EncodedDepthImage.
def columns(*, blob=None, media_type=None, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
blob
|
The encoded depth payload. Supported are: * single channel PNG * RVL with ROS2 metadata (for details see https://github.com/ros-perception/image_transport_plugins/tree/jazzy)
TYPE:
|
media_type
|
Media type of the blob, e.g.:
TYPE:
|
meter
|
Conversion from native units to meters (e.g. If omitted, the Viewer defaults to
TYPE:
|
colormap
|
Optional colormap for visualization of decoded depth.
TYPE:
|
depth_range
|
Optional visualization range for depth values.
TYPE:
|
point_fill_ratio
|
Optional point fill ratio for point-cloud projection.
TYPE:
|
draw_order
|
Optional 2D draw order.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views. The filter is applied to the scalar values before they are mapped to color via the colormap. Has no effect in 3D views.
TYPE:
|
def from_fields(*, clear_unset=False, blob=None, media_type=None, meter=None, colormap=None, depth_range=None, point_fill_ratio=None, draw_order=None, magnification_filter=None)
classmethod
Update only some specific fields of a EncodedDepthImage.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
blob
|
The encoded depth payload. Supported are: * single channel PNG * RVL with ROS2 metadata (for details see https://github.com/ros-perception/image_transport_plugins/tree/jazzy)
TYPE:
|
media_type
|
Media type of the blob, e.g.:
TYPE:
|
meter
|
Conversion from native units to meters (e.g. If omitted, the Viewer defaults to
TYPE:
|
colormap
|
Optional colormap for visualization of decoded depth.
TYPE:
|
depth_range
|
Optional visualization range for depth values.
TYPE:
|
point_fill_ratio
|
Optional point fill ratio for point-cloud projection.
TYPE:
|
draw_order
|
Optional 2D draw order.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel) in 2D views. The filter is applied to the scalar values before they are mapped to color via the colormap. Has no effect in 3D views.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class EncodedImage
Bases: EncodedImageExt, Archetype, VisualizableArchetype
Archetype: An image encoded as e.g. a JPEG or PNG.
Rerun also supports uncompressed images with the archetypes.Image.
For images that refer to video frames see archetypes.VideoFrameReference.
To compress an image, use rerun.Image.compress.
Example
Encoded image:
from pathlib import Path
import rerun as rr
image_file_path = Path(__file__).parent / "ferris.png"
rr.init("rerun_example_encoded_image", spawn=True)
rr.log("image", rr.EncodedImage(path=image_file_path))

def __init__(*, path=None, contents=None, media_type=None, opacity=None, draw_order=None, magnification_filter=None)
Create a new instance of the EncodedImage archetype.
| PARAMETER | DESCRIPTION |
|---|---|
path
|
A path to an file stored on the local filesystem. Mutually
exclusive with |
contents
|
The contents of the file. Can be a BufferedReader, BytesIO, or
bytes. Mutually exclusive with |
media_type
|
The Media Type of the asset. For instance:
* If omitted, it will be guessed from the
TYPE:
|
opacity
|
Opacity of the image, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def cleared()
classmethod
Clear all the fields of a EncodedImage.
def columns(*, blob=None, media_type=None, opacity=None, draw_order=None, magnification_filter=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
blob
|
The encoded content of some image file, e.g. a PNG or JPEG.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
opacity
|
Opacity of the image, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def from_fields(*, clear_unset=False, blob=None, media_type=None, opacity=None, draw_order=None, magnification_filter=None)
classmethod
Update only some specific fields of a EncodedImage.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
blob
|
The encoded content of some image file, e.g. a PNG or JPEG.
TYPE:
|
media_type
|
The Media Type of the asset. Supported values:
* If omitted, the viewer will try to guess from the data blob. If it cannot guess, it won't be able to render the asset.
TYPE:
|
opacity
|
Opacity of the image, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class GeoLineStrings
Bases: GeoLineStringsExt, Archetype, VisualizableArchetype
Archetype: Geospatial line strings with positions expressed in EPSG:4326 latitude and longitude (North/East-positive degrees), and optional colors and radii.
Also known as "line strips" or "polylines".
Example
Log a geospatial line string:
import rerun as rr
rr.init("rerun_example_geo_line_strings", spawn=True)
rr.log(
"colorado",
rr.GeoLineStrings(
lat_lon=[
[41.0000, -109.0452],
[41.0000, -102.0415],
[36.9931, -102.0415],
[36.9931, -109.0452],
[41.0000, -109.0452],
],
radii=rr.Radius.ui_points(2.0),
colors=[0, 0, 255],
),
)
def __init__(*, lat_lon, radii=None, colors=None)
Create a new instance of the GeoLineStrings archetype.
| PARAMETER | DESCRIPTION |
|---|---|
lat_lon
|
The line strings, expressed in EPSG:4326 coordinates (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the line strings.
TYPE:
|
colors
|
Optional colors for the linestrings. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a GeoLineStrings.
def columns(*, line_strings=None, radii=None, colors=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
line_strings
|
The line strings, expressed in EPSG:4326 coordinates (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the line strings. Note: scene units radiii are interpreted as meters. Currently, the display scale only considers the latitude of the first vertex of each line string (see this issue).
TYPE:
|
colors
|
Optional colors for the line strings. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
def from_fields(*, clear_unset=False, line_strings=None, radii=None, colors=None)
classmethod
Update only some specific fields of a GeoLineStrings.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
line_strings
|
The line strings, expressed in EPSG:4326 coordinates (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the line strings. Note: scene units radiii are interpreted as meters. Currently, the display scale only considers the latitude of the first vertex of each line string (see this issue).
TYPE:
|
colors
|
Optional colors for the line strings. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class GeoPoints
Bases: GeoPointsExt, Archetype, VisualizableArchetype
Archetype: Geospatial points with positions expressed in EPSG:4326 latitude and longitude (North/East-positive degrees), and optional colors and radii.
Example
Log a geospatial point:
import rerun as rr
rr.init("rerun_example_geo_points", spawn=True)
rr.log(
"rerun_hq",
rr.GeoPoints(
lat_lon=[59.319221, 18.075631],
radii=rr.Radius.ui_points(10.0),
colors=[255, 0, 0],
),
)
def __init__(*, lat_lon, radii=None, colors=None, class_ids=None)
Create a new instance of the GeoPoints archetype.
| PARAMETER | DESCRIPTION |
|---|---|
lat_lon
|
The EPSG:4326 coordinates for the points (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def cleared()
classmethod
Clear all the fields of a GeoPoints.
def columns(*, positions=None, radii=None, colors=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
positions
|
The EPSG:4326 coordinates for the points (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles. Note: scene units radiii are interpreted as meters.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def from_fields(*, clear_unset=False, positions=None, radii=None, colors=None, class_ids=None)
classmethod
Update only some specific fields of a GeoPoints.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
positions
|
The EPSG:4326 coordinates for the points (North/East-positive degrees).
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles. Note: scene units radiii are interpreted as meters.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class GraphEdges
Bases: Archetype, VisualizableArchetype
Archetype: A list of edges in a graph.
By default, edges are undirected.
Example
Simple directed graph:
import rerun as rr
rr.init("rerun_example_graph_directed", spawn=True)
rr.log(
"simple",
rr.GraphNodes(
node_ids=["a", "b", "c"],
positions=[(0.0, 100.0), (-100.0, 0.0), (100.0, 0.0)],
labels=["A", "B", "C"],
),
rr.GraphEdges(edges=[("a", "b"), ("b", "c"), ("c", "a")], graph_type="directed"),
)
def __init__(edges, *, graph_type=None)
Create a new instance of the GraphEdges archetype.
| PARAMETER | DESCRIPTION |
|---|---|
edges
|
A list of node tuples.
TYPE:
|
graph_type
|
Specifies if the graph is directed or undirected. If no
TYPE:
|
def cleared()
classmethod
Clear all the fields of a GraphEdges.
def columns(*, edges=None, graph_type=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
edges
|
A list of node tuples.
TYPE:
|
graph_type
|
Specifies if the graph is directed or undirected. If no
TYPE:
|
def from_fields(*, clear_unset=False, edges=None, graph_type=None)
classmethod
Update only some specific fields of a GraphEdges.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
edges
|
A list of node tuples.
TYPE:
|
graph_type
|
Specifies if the graph is directed or undirected. If no
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class GraphNodes
Bases: Archetype, VisualizableArchetype
Archetype: A list of nodes in a graph with optional labels, colors, etc.
Example
Simple directed graph:
import rerun as rr
rr.init("rerun_example_graph_directed", spawn=True)
rr.log(
"simple",
rr.GraphNodes(
node_ids=["a", "b", "c"],
positions=[(0.0, 100.0), (-100.0, 0.0), (100.0, 0.0)],
labels=["A", "B", "C"],
),
rr.GraphEdges(edges=[("a", "b"), ("b", "c"), ("c", "a")], graph_type="directed"),
)
def __init__(node_ids, *, positions=None, colors=None, labels=None, show_labels=None, radii=None)
Create a new instance of the GraphNodes archetype.
| PARAMETER | DESCRIPTION |
|---|---|
node_ids
|
A list of node IDs.
TYPE:
|
positions
|
Optional center positions of the nodes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
labels
|
Optional text labels for the node.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
radii
|
Optional radii for nodes.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a GraphNodes.
def columns(*, node_ids=None, positions=None, colors=None, labels=None, show_labels=None, radii=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
node_ids
|
A list of node IDs.
TYPE:
|
positions
|
Optional center positions of the nodes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
labels
|
Optional text labels for the node.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
radii
|
Optional radii for nodes.
TYPE:
|
def from_fields(*, clear_unset=False, node_ids=None, positions=None, colors=None, labels=None, show_labels=None, radii=None)
classmethod
Update only some specific fields of a GraphNodes.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
node_ids
|
A list of node IDs.
TYPE:
|
positions
|
Optional center positions of the nodes.
TYPE:
|
colors
|
Optional colors for the boxes.
TYPE:
|
labels
|
Optional text labels for the node.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
radii
|
Optional radii for nodes.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class GridMap
Bases: Archetype
Archetype: A 2D grid map stored as raster data in an image buffer, with a cell size in scene units and pose.
This archetype is intended for robotics applications like occupancy maps or navigation costmaps.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
Example
Simple occupancy grid map:
import numpy as np
import rerun as rr
width, height = 64, 64
cell_size = 0.1
# Create a synthetic image with ROS `nav_msgs/OccupancyGrid` cell value conventions:
# -1 (255) unknown, 0 free, 100 occupied.
grid = np.full((height, width), -1, dtype=np.int8)
grid[8:56, 8:56] = 0
grid[20:44, 20:44] = 100
rr.init("rerun_example_grid_map", spawn=True)
rr.log(
"world/map",
rr.GridMap(
data=grid.tobytes(),
format=rr.components.ImageFormat(
width=width,
height=height,
color_model="L",
channel_datatype="U8",
),
cell_size=cell_size,
translation=[-(width * cell_size) / 2.0, -(height * cell_size) / 2.0, 0.0],
colormap=None,
),
)
def __init__(*, data, format, cell_size, translation=None, rotation_axis_angle=None, quaternion=None, opacity=None, draw_order=None, colormap=None)
Create a new instance of the GridMap archetype.
| PARAMETER | DESCRIPTION |
|---|---|
data
|
The raw grid data.
TYPE:
|
format
|
The format of the grid's image data.
TYPE:
|
cell_size
|
The scene unit size of a single grid cell (e.g. m / pixel).
TYPE:
|
translation
|
Translation of the lower-left corner of the grid map in space. Together with If not set, the lower-left image corner is placed at origin of the map's parent coordinate frame.
TYPE:
|
rotation_axis_angle
|
Rotation of the lower-left corner of the grid map in space via axis + angle. Together with Note: either this or
TYPE:
|
quaternion
|
Rotation of the lower-left corner of the grid map in space via quaternion. Together with
TYPE:
|
opacity
|
Opacity of the grid map texture after all image decoding and colormap application. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
Optional draw order for layering multiple grid maps that overlap in space. Higher values are drawn on top of lower values.
TYPE:
|
colormap
|
Colormap to use for rendering single-channel grid maps. If not set, the grid map is shown using the underlying
TYPE:
|
def cleared()
classmethod
Clear all the fields of a GridMap.
def columns(*, data=None, format=None, cell_size=None, translation=None, rotation_axis_angle=None, quaternion=None, opacity=None, draw_order=None, colormap=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
data
|
The raw grid data.
TYPE:
|
format
|
The format of the grid's image data.
TYPE:
|
cell_size
|
The scene unit size of a single grid cell (e.g. m / pixel).
TYPE:
|
translation
|
Translation of the lower-left corner of the grid map in space. Together with If not set, the lower-left image corner is placed at origin of the map's parent coordinate frame.
TYPE:
|
rotation_axis_angle
|
Rotation of the lower-left corner of the grid map in space via axis + angle. Together with Note: either this or
TYPE:
|
quaternion
|
Rotation of the lower-left corner of the grid map in space via quaternion. Together with
TYPE:
|
opacity
|
Opacity of the grid map texture after all image decoding and colormap application. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
Optional draw order for layering multiple grid maps that overlap in space. Higher values are drawn on top of lower values.
TYPE:
|
colormap
|
Colormap to use for rendering single-channel grid maps. If not set, the grid map is shown using the underlying
TYPE:
|
def from_fields(*, clear_unset=False, data=None, format=None, cell_size=None, translation=None, rotation_axis_angle=None, quaternion=None, opacity=None, draw_order=None, colormap=None)
classmethod
Update only some specific fields of a GridMap.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
data
|
The raw grid data.
TYPE:
|
format
|
The format of the grid's image data.
TYPE:
|
cell_size
|
The scene unit size of a single grid cell (e.g. m / pixel).
TYPE:
|
translation
|
Translation of the lower-left corner of the grid map in space. Together with If not set, the lower-left image corner is placed at origin of the map's parent coordinate frame.
TYPE:
|
rotation_axis_angle
|
Rotation of the lower-left corner of the grid map in space via axis + angle. Together with Note: either this or
TYPE:
|
quaternion
|
Rotation of the lower-left corner of the grid map in space via quaternion. Together with
TYPE:
|
opacity
|
Opacity of the grid map texture after all image decoding and colormap application. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
Optional draw order for layering multiple grid maps that overlap in space. Higher values are drawn on top of lower values.
TYPE:
|
colormap
|
Colormap to use for rendering single-channel grid maps. If not set, the grid map is shown using the underlying
TYPE:
|
class Image
Bases: ImageExt, Archetype, VisualizableArchetype
Archetype: A monochrome or color image.
See also archetypes.DepthImage and archetypes.SegmentationImage.
Rerun also supports compressed images (JPEG, PNG, …), using archetypes.EncodedImage.
For images that refer to video frames see archetypes.VideoFrameReference.
Compressing images or using video data instead can save a lot of bandwidth and memory.
The raw image data is stored as a single buffer of bytes in a components.Blob.
The meaning of these bytes is determined by the components.ImageFormat which specifies the resolution
and the pixel format (e.g. RGB, RGBA, …).
The order of dimensions in the underlying components.Blob follows the typical
row-major, interleaved-pixel image format.
Examples:
image_simple:
import numpy as np
import rerun as rr
# Create an image with numpy
image = np.zeros((200, 300, 3), dtype=np.uint8)
image[:, :, 0] = 255
image[50:150, 50:150] = (0, 255, 0)
rr.init("rerun_example_image", spawn=True)
rr.log("image", rr.Image(image))
Logging images with various formats:
import numpy as np
import rerun as rr
rr.init("rerun_example_image_formats", spawn=True)
# Simple gradient image, logged in different formats.
image = np.array([[[x, min(255, x + y), y] for x in range(256)] for y in range(256)], dtype=np.uint8)
rr.log("image_rgb", rr.Image(image))
rr.log("image_green_only", rr.Image(image[:, :, 1], color_model="l")) # Luminance only
rr.log("image_bgr", rr.Image(image[:, :, ::-1], color_model="bgr")) # BGR
# New image with Separate Y/U/V planes with 4:2:2 chroma downsampling
y = bytes([128 for y in range(256) for x in range(256)])
u = bytes([x * 2 for y in range(256) for x in range(128)]) # Half horizontal resolution for chroma.
v = bytes([y for y in range(256) for x in range(128)])
rr.log("image_yuv422", rr.Image(bytes=y + u + v, width=256, height=256, pixel_format=rr.PixelFormat.Y_U_V16_FullRange))
def __init__(image=None, color_model=None, *, pixel_format=None, datatype=None, bytes=None, width=None, height=None, opacity=None, draw_order=None, magnification_filter=None)
Create a new image with a given format.
There are three ways to create an image:
* By specifying an image as an appropriately shaped ndarray with an appropriate color_model.
* By specifying bytes of an image with a pixel_format, together with width, height.
* By specifying bytes of an image with a datatype and color_model, together with width, height.
| PARAMETER | DESCRIPTION |
|---|---|
image
|
A numpy array or tensor with the image data.
Leading and trailing unit-dimensions are ignored, so that
TYPE:
|
color_model
|
L, RGB, RGBA, BGR, BGRA, etc, specifying how to interpret
TYPE:
|
pixel_format
|
NV12, YUV420, etc. For chroma-downsampling.
Requires
TYPE:
|
datatype
|
The datatype of the image data. If not specified, it is inferred from the
TYPE:
|
bytes
|
The raw bytes of an image specified by
TYPE:
|
width
|
The width of the image. Only requires for
TYPE:
|
height
|
The height of the image. Only requires for
TYPE:
|
opacity
|
Optional opacity of the image, in 0-1. Set to 0.5 for a translucent image.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def as_pil_image()
Convert the image to a PIL Image.
def cleared()
classmethod
Clear all the fields of a Image.
def columns(*, buffer=None, format=None, opacity=None, draw_order=None, magnification_filter=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
buffer
|
The raw image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
opacity
|
Opacity of the image, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def compress(jpeg_quality=95)
Compress the given image as a JPEG.
JPEG compression works best for photographs. Only U8 RGB and grayscale images are supported, not RGBA. Note that compressing to JPEG costs a bit of CPU time, both when logging and later when viewing them.
| PARAMETER | DESCRIPTION |
|---|---|
jpeg_quality
|
Higher quality = larger file size. A quality of 95 saves a lot of space, but is still visually very similar.
TYPE:
|
def from_fields(*, clear_unset=False, buffer=None, format=None, opacity=None, draw_order=None, magnification_filter=None)
classmethod
Update only some specific fields of a Image.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
buffer
|
The raw image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
opacity
|
Opacity of the image, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
magnification_filter
|
Optional filter used when a texel is magnified (displayed larger than a screen pixel).
TYPE:
|
def image_format()
Returns the image format of this image.
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class InstancePoses3D
Bases: Archetype
Archetype: One or more transforms applied on the current entity's transform frame.
Unlike archetypes.Transform3D, it is not propagated in the transform hierarchy.
If archetypes.CoordinateFrame is specified, it acts relative to that coordinate frame,
otherwise it is relative to the entity's implicit coordinate frame.
Whenever you log this archetype, the state of the resulting overall pose is fully reset to the new archetype. This means that if you first log a pose with only a translation, and then log one with only a rotation, it will be resolved to a pose with only a rotation. (This is unlike how we usually apply latest-at semantics on an archetype where we take the latest state of any component independently)
From the point of view of the entity's coordinate system, all components are applied in the inverse order they are listed here. E.g. if both a translation and a mat3x3 transform are present, the 3x3 matrix is applied first, followed by the translation.
Currently, many visualizers support only a single instance transform per entity.
Check archetype documentations for details - if not otherwise specified, only the first instance transform is applied.
Some visualizers like the mesh visualizer used for archetypes.Mesh3D,
will draw an object for every pose, a behavior also known as "instancing".
Example
Regular & instance transforms in tandem:
import numpy as np
import rerun as rr
rr.init("rerun_example_instance_pose3d_combined", spawn=True)
rr.set_time("frame", sequence=0)
# Log a box and points further down in the hierarchy.
rr.log("world/box", rr.Boxes3D(half_sizes=[[1.0, 1.0, 1.0]]))
lin = np.linspace(-10, 10, 10)
z, y, x = np.meshgrid(lin, lin, lin, indexing="ij")
point_grid = np.vstack([x.flatten(), y.flatten(), z.flatten()]).T
rr.log("world/box/points", rr.Points3D(point_grid))
for i in range(180):
rr.set_time("frame", sequence=i)
# Log a regular transform which affects both the box and the points.
rr.log("world/box", rr.Transform3D(rotation_axis_angle=rr.RotationAxisAngle([0, 0, 1], angle=rr.Angle(deg=i * 2))))
# Log an instance pose which affects only the box.
rr.log("world/box", rr.InstancePoses3D(translations=[0, 0, abs(i * 0.1 - 5.0) - 5.0]))
def __init__(*, translations=None, rotation_axis_angles=None, quaternions=None, scales=None, mat3x3=None)
Create a new instance of the InstancePoses3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
translations
|
Translation vectors.
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle.
TYPE:
|
quaternions
|
Rotations via quaternion.
TYPE:
|
scales
|
Scaling factors.
TYPE:
|
mat3x3
|
3x3 transformation matrices.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a InstancePoses3D.
def columns(*, translations=None, rotation_axis_angles=None, quaternions=None, scales=None, mat3x3=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
translations
|
Translation vectors.
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle.
TYPE:
|
quaternions
|
Rotations via quaternion.
TYPE:
|
scales
|
Scaling factors.
TYPE:
|
mat3x3
|
3x3 transformation matrices.
TYPE:
|
def from_fields(*, clear_unset=False, translations=None, rotation_axis_angles=None, quaternions=None, scales=None, mat3x3=None)
classmethod
Update only some specific fields of a InstancePoses3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
translations
|
Translation vectors.
TYPE:
|
rotation_axis_angles
|
Rotations via axis + angle.
TYPE:
|
quaternions
|
Rotations via quaternion.
TYPE:
|
scales
|
Scaling factors.
TYPE:
|
mat3x3
|
3x3 transformation matrices.
TYPE:
|
class LineStrips2D
Bases: Archetype, VisualizableArchetype
Archetype: 2D line strips with positions and optional colors, radii, labels, etc.
Examples:
line_strips2d_batch:
import rerun as rr
import rerun.blueprint as rrb
rr.init("rerun_example_line_strip2d_batch", spawn=True)
rr.log(
"strips",
rr.LineStrips2D(
[
[[0, 0], [2, 1], [4, -1], [6, 0]],
[[0, 3], [1, 4], [2, 2], [3, 4], [4, 2], [5, 4], [6, 3]],
],
colors=[[255, 0, 0], [0, 255, 0]],
radii=[0.025, 0.005],
labels=["one strip here", "and one strip there"],
),
)
# Set view bounds:
rr.send_blueprint(rrb.Spatial2DView(visual_bounds=rrb.VisualBounds2D(x_range=[-1, 7], y_range=[-3, 6])))
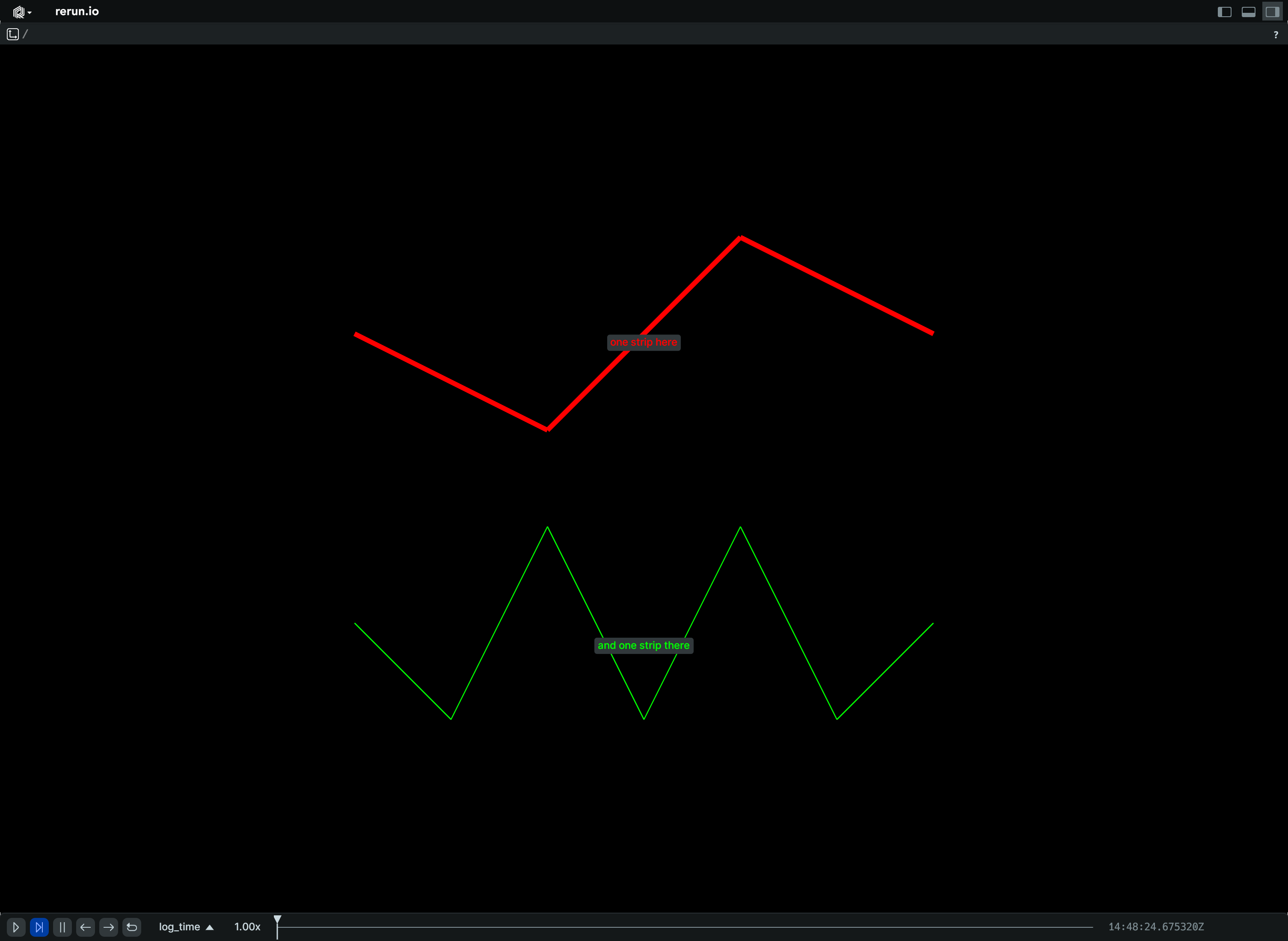
Lines with scene & UI radius each:
import rerun as rr
import rerun.blueprint as rrb
rr.init("rerun_example_line_strip2d_ui_radius", spawn=True)
# A blue line with a scene unit radii of 0.01.
points = [[0, 0], [0, 1], [1, 0], [1, 1]]
rr.log(
"scene_unit_line",
rr.LineStrips2D(
[points],
# By default, radii are interpreted as world-space units.
radii=0.01,
colors=[0, 0, 255],
),
)
# A red line with a ui point radii of 5.
# UI points are independent of zooming in Views, but are sensitive to the application UI scaling.
# For 100% ui scaling, UI points are equal to pixels.
points = [[3, 0], [3, 1], [4, 0], [4, 1]]
rr.log(
"ui_points_line",
rr.LineStrips2D(
[points],
# rr.Radius.ui_points produces radii that the viewer interprets as given in ui points.
radii=rr.Radius.ui_points(5.0),
colors=[255, 0, 0],
),
)
# Set view bounds:
rr.send_blueprint(rrb.Spatial2DView(visual_bounds=rrb.VisualBounds2D(x_range=[-1, 5], y_range=[-1, 2])))
def __init__(strips, *, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
Create a new instance of the LineStrips2D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
strips
|
All the actual 2D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order of each line strip. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def cleared()
classmethod
Clear all the fields of a LineStrips2D.
def columns(*, strips=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
strips
|
All the actual 2D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order of each line strip. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def from_fields(*, clear_unset=False, strips=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None)
classmethod
Update only some specific fields of a LineStrips2D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
strips
|
All the actual 2D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order of each line strip. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class LineStrips3D
Bases: Archetype, VisualizableArchetype
Archetype: 3D line strips with positions and optional colors, radii, labels, etc.
Examples:
Many strips:
import rerun as rr
rr.init("rerun_example_line_strip3d_batch", spawn=True)
rr.log(
"strips",
rr.LineStrips3D(
[
[
[0, 0, 2],
[1, 0, 2],
[1, 1, 2],
[0, 1, 2],
],
[
[0, 0, 0],
[0, 0, 1],
[1, 0, 0],
[1, 0, 1],
[1, 1, 0],
[1, 1, 1],
[0, 1, 0],
[0, 1, 1],
],
],
colors=[[255, 0, 0], [0, 255, 0]],
radii=[0.025, 0.005],
labels=["one strip here", "and one strip there"],
),
)

Lines with scene & UI radius each:
import rerun as rr
rr.init("rerun_example_line_strip3d_ui_radius", spawn=True)
# A blue line with a scene unit radii of 0.01.
points = [[0, 0, 0], [0, 0, 1], [1, 0, 0], [1, 0, 1]]
rr.log(
"scene_unit_line",
rr.LineStrips3D(
[points],
# By default, radii are interpreted as world-space units.
radii=0.01,
colors=[0, 0, 255],
),
)
# A red line with a ui point radii of 5.
# UI points are independent of zooming in Views, but are sensitive to the application UI scaling.
# For 100% ui scaling, UI points are equal to pixels.
points = [[3, 0, 0], [3, 0, 1], [4, 0, 0], [4, 0, 1]]
rr.log(
"ui_points_line",
rr.LineStrips3D(
[points],
# rr.Radius.ui_points produces radii that the viewer interprets as given in ui points.
radii=rr.Radius.ui_points(5.0),
colors=[255, 0, 0],
),
)
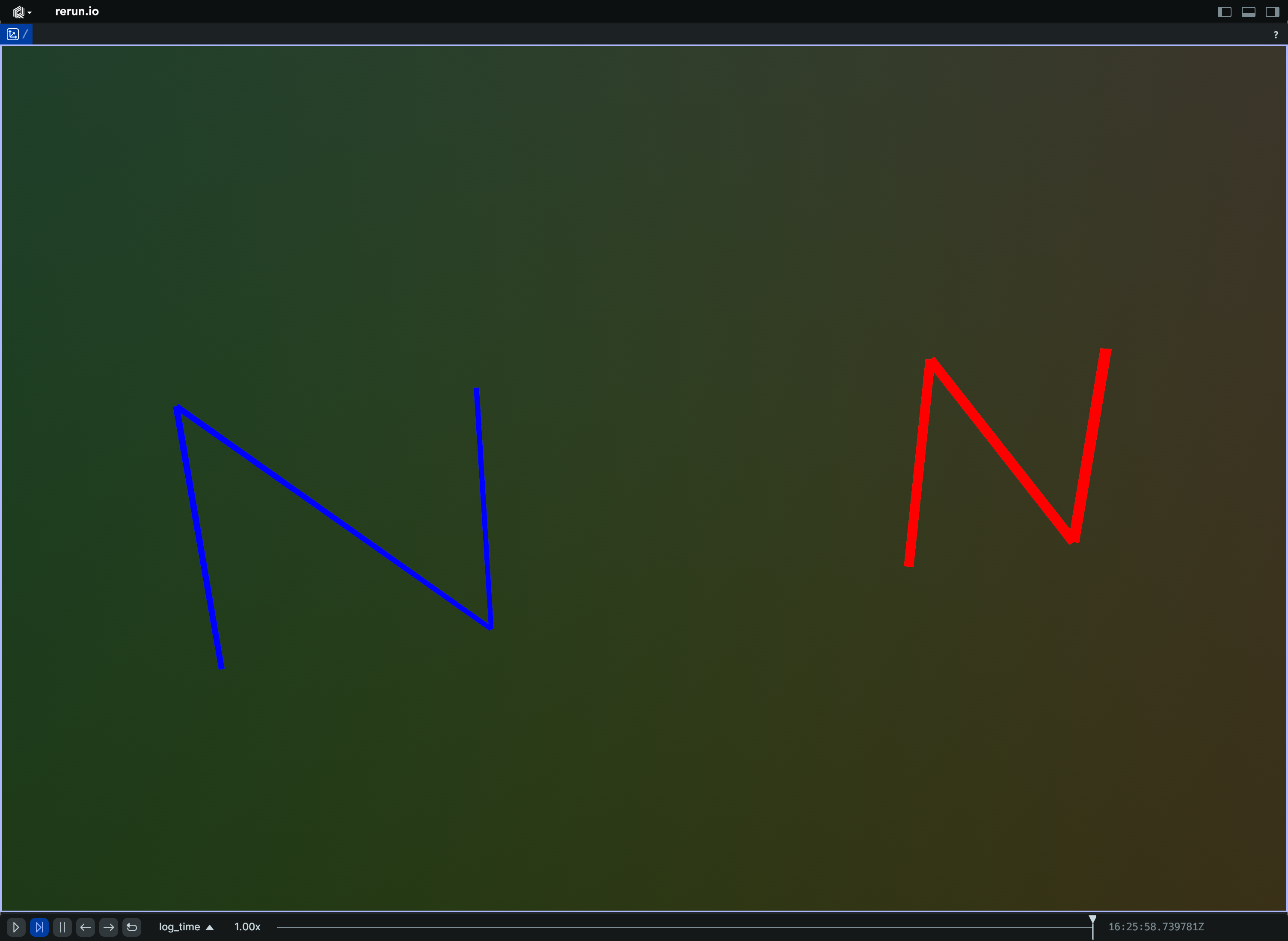
def __init__(strips, *, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
Create a new instance of the LineStrips3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
strips
|
All the actual 3D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def cleared()
classmethod
Clear all the fields of a LineStrips3D.
def columns(*, strips=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
strips
|
All the actual 3D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def from_fields(*, clear_unset=False, strips=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None)
classmethod
Update only some specific fields of a LineStrips3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
strips
|
All the actual 3D line strips that make up the batch.
TYPE:
|
radii
|
Optional radii for the line strips.
TYPE:
|
colors
|
Optional colors for the line strips.
TYPE:
|
labels
|
Optional text labels for the line strips. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class McapChannel
Bases: Archetype
Archetype: A channel within an MCAP file that defines how messages are structured and encoded.
Channels in MCAP files group messages by topic and define their encoding format. Each channel has a unique identifier and specifies the message schema and encoding used for all messages published to that topic.
See also archetypes.McapMessage for individual messages within a channel,
archetypes.McapSchema for the data structure definitions, and the
MCAP specification for complete format details.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
def __init__(*, id, topic, message_encoding, metadata=None)
Create a new instance of the McapChannel archetype.
| PARAMETER | DESCRIPTION |
|---|---|
id
|
Unique identifier for this channel within the MCAP file. Channel IDs must be unique within a single MCAP file and are used to associate messages with their corresponding channel definition.
TYPE:
|
topic
|
The topic name that this channel publishes to. Topics are hierarchical paths from the original robotics system (e.g., "/sensors/camera/image") that categorize and organize different data streams. Topics are separate from Rerun's entity paths, but they often can be mapped to them.
TYPE:
|
message_encoding
|
The encoding format used for messages in this channel. Common encodings include:
*
TYPE:
|
metadata
|
Additional metadata for this channel stored as key-value pairs. This can include channel-specific configuration, description, units, coordinate frames, or any other contextual information that helps interpret the data in this channel.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a McapChannel.
def columns(*, id=None, topic=None, message_encoding=None, metadata=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
id
|
Unique identifier for this channel within the MCAP file. Channel IDs must be unique within a single MCAP file and are used to associate messages with their corresponding channel definition.
TYPE:
|
topic
|
The topic name that this channel publishes to. Topics are hierarchical paths from the original robotics system (e.g., "/sensors/camera/image") that categorize and organize different data streams. Topics are separate from Rerun's entity paths, but they often can be mapped to them.
TYPE:
|
message_encoding
|
The encoding format used for messages in this channel. Common encodings include:
*
TYPE:
|
metadata
|
Additional metadata for this channel stored as key-value pairs. This can include channel-specific configuration, description, units, coordinate frames, or any other contextual information that helps interpret the data in this channel.
TYPE:
|
def from_fields(*, clear_unset=False, id=None, topic=None, message_encoding=None, metadata=None)
classmethod
Update only some specific fields of a McapChannel.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
id
|
Unique identifier for this channel within the MCAP file. Channel IDs must be unique within a single MCAP file and are used to associate messages with their corresponding channel definition.
TYPE:
|
topic
|
The topic name that this channel publishes to. Topics are hierarchical paths from the original robotics system (e.g., "/sensors/camera/image") that categorize and organize different data streams. Topics are separate from Rerun's entity paths, but they often can be mapped to them.
TYPE:
|
message_encoding
|
The encoding format used for messages in this channel. Common encodings include:
*
TYPE:
|
metadata
|
Additional metadata for this channel stored as key-value pairs. This can include channel-specific configuration, description, units, coordinate frames, or any other contextual information that helps interpret the data in this channel.
TYPE:
|
class McapMessage
Bases: Archetype
Archetype: The binary payload of a single MCAP message, without metadata.
This archetype represents only the raw message data from an MCAP file. It does not include MCAP message metadata such as timestamps, channel IDs, sequence numbers, or publication times. The binary payload represents sensor data, commands, or other information encoded according to the format specified by the associated channel.
See archetypes.McapChannel for channel definitions that specify message encoding,
archetypes.McapSchema for data structure definitions, and the
MCAP specification for complete format details.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
def __init__(data)
Create a new instance of the McapMessage archetype.
| PARAMETER | DESCRIPTION |
|---|---|
data
|
The raw message payload as a binary blob. This contains the actual message data encoded according to the format specified
by the associated channel's
TYPE:
|
def cleared()
classmethod
Clear all the fields of a McapMessage.
def columns(*, data=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
data
|
The raw message payload as a binary blob. This contains the actual message data encoded according to the format specified
by the associated channel's
TYPE:
|
def from_fields(*, clear_unset=False, data=None)
classmethod
Update only some specific fields of a McapMessage.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
data
|
The raw message payload as a binary blob. This contains the actual message data encoded according to the format specified
by the associated channel's
TYPE:
|
class McapSchema
Bases: Archetype
Archetype: A schema definition that describes the structure of messages in an MCAP file.
Schemas define the data types and field structures used by messages in MCAP channels. They provide the blueprint for interpreting message payloads, specifying field names, types, and organization. Each schema is referenced by channels to indicate how their messages should be decoded and understood.
See also archetypes.McapChannel for channels that reference these schemas,
archetypes.McapMessage for the messages that conform to these schemas, and the
MCAP specification for complete format details.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
def __init__(*, id, name, encoding, data)
Create a new instance of the McapSchema archetype.
| PARAMETER | DESCRIPTION |
|---|---|
id
|
Unique identifier for this schema within the MCAP file. Schema IDs must be unique within an MCAP file and are referenced by channels to specify their message structure. A single schema can be shared across multiple channels.
TYPE:
|
name
|
Human-readable name identifying this schema. Schema names typically describe the message type or data structure
(e.g.,
TYPE:
|
encoding
|
The schema definition format used to describe the message structure. Common schema encodings include:
*
TYPE:
|
data
|
The schema definition content as binary data. This contains the actual schema specification in the format indicated by the
TYPE:
|
def cleared()
classmethod
Clear all the fields of a McapSchema.
def columns(*, id=None, name=None, encoding=None, data=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
id
|
Unique identifier for this schema within the MCAP file. Schema IDs must be unique within an MCAP file and are referenced by channels to specify their message structure. A single schema can be shared across multiple channels.
TYPE:
|
name
|
Human-readable name identifying this schema. Schema names typically describe the message type or data structure
(e.g.,
TYPE:
|
encoding
|
The schema definition format used to describe the message structure. Common schema encodings include:
*
TYPE:
|
data
|
The schema definition content as binary data. This contains the actual schema specification in the format indicated by the
TYPE:
|
def from_fields(*, clear_unset=False, id=None, name=None, encoding=None, data=None)
classmethod
Update only some specific fields of a McapSchema.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
id
|
Unique identifier for this schema within the MCAP file. Schema IDs must be unique within an MCAP file and are referenced by channels to specify their message structure. A single schema can be shared across multiple channels.
TYPE:
|
name
|
Human-readable name identifying this schema. Schema names typically describe the message type or data structure
(e.g.,
TYPE:
|
encoding
|
The schema definition format used to describe the message structure. Common schema encodings include:
*
TYPE:
|
data
|
The schema definition content as binary data. This contains the actual schema specification in the format indicated by the
TYPE:
|
class McapStatistics
Bases: Archetype
Archetype: Recording-level statistics about an MCAP file, logged as a part of archetypes.RecordingInfo.
This archetype contains summary information about an entire MCAP recording, including counts of messages, schemas, channels, and other records, as well as timing information spanning the full recording duration. It is typically logged once per recording to provide an overview of the dataset's structure and content.
See also archetypes.McapChannel for individual channel definitions,
archetypes.McapMessage for message content, archetypes.McapSchema for schema definitions,
and the MCAP specification for complete format details.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
def __init__(*, message_count, schema_count, channel_count, attachment_count, metadata_count, chunk_count, message_start_time, message_end_time, channel_message_counts=None)
Create a new instance of the McapStatistics archetype.
| PARAMETER | DESCRIPTION |
|---|---|
message_count
|
Total number of data messages contained in the MCAP recording. This count includes all timestamped data messages but excludes metadata records, schema definitions, and other non-message records.
TYPE:
|
schema_count
|
Number of unique schema definitions in the recording. Each schema defines the structure for one or more message types used by channels.
TYPE:
|
channel_count
|
Number of channels defined in the recording. Each channel represents a unique topic and encoding combination for publishing messages.
TYPE:
|
attachment_count
|
Number of file attachments embedded in the recording. Attachments can include calibration files, configuration data, or other auxiliary files.
TYPE:
|
metadata_count
|
Number of metadata records providing additional context about the recording. Metadata records contain key-value pairs with information about the recording environment, system configuration, or other contextual data.
TYPE:
|
chunk_count
|
Number of data chunks used to organize messages in the file. Chunks group related messages together for efficient storage and indexed access.
TYPE:
|
message_start_time
|
Timestamp of the earliest message in the recording. This marks the beginning of the recorded data timeline.
TYPE:
|
message_end_time
|
Timestamp of the latest message in the recording. Together with
TYPE:
|
channel_message_counts
|
Detailed breakdown of message counts per channel.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a McapStatistics.
def columns(*, message_count=None, schema_count=None, channel_count=None, attachment_count=None, metadata_count=None, chunk_count=None, message_start_time=None, message_end_time=None, channel_message_counts=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
message_count
|
Total number of data messages contained in the MCAP recording. This count includes all timestamped data messages but excludes metadata records, schema definitions, and other non-message records.
TYPE:
|
schema_count
|
Number of unique schema definitions in the recording. Each schema defines the structure for one or more message types used by channels.
TYPE:
|
channel_count
|
Number of channels defined in the recording. Each channel represents a unique topic and encoding combination for publishing messages.
TYPE:
|
attachment_count
|
Number of file attachments embedded in the recording. Attachments can include calibration files, configuration data, or other auxiliary files.
TYPE:
|
metadata_count
|
Number of metadata records providing additional context about the recording. Metadata records contain key-value pairs with information about the recording environment, system configuration, or other contextual data.
TYPE:
|
chunk_count
|
Number of data chunks used to organize messages in the file. Chunks group related messages together for efficient storage and indexed access.
TYPE:
|
message_start_time
|
Timestamp of the earliest message in the recording. This marks the beginning of the recorded data timeline.
TYPE:
|
message_end_time
|
Timestamp of the latest message in the recording. Together with
TYPE:
|
channel_message_counts
|
Detailed breakdown of message counts per channel.
TYPE:
|
def from_fields(*, clear_unset=False, message_count=None, schema_count=None, channel_count=None, attachment_count=None, metadata_count=None, chunk_count=None, message_start_time=None, message_end_time=None, channel_message_counts=None)
classmethod
Update only some specific fields of a McapStatistics.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
message_count
|
Total number of data messages contained in the MCAP recording. This count includes all timestamped data messages but excludes metadata records, schema definitions, and other non-message records.
TYPE:
|
schema_count
|
Number of unique schema definitions in the recording. Each schema defines the structure for one or more message types used by channels.
TYPE:
|
channel_count
|
Number of channels defined in the recording. Each channel represents a unique topic and encoding combination for publishing messages.
TYPE:
|
attachment_count
|
Number of file attachments embedded in the recording. Attachments can include calibration files, configuration data, or other auxiliary files.
TYPE:
|
metadata_count
|
Number of metadata records providing additional context about the recording. Metadata records contain key-value pairs with information about the recording environment, system configuration, or other contextual data.
TYPE:
|
chunk_count
|
Number of data chunks used to organize messages in the file. Chunks group related messages together for efficient storage and indexed access.
TYPE:
|
message_start_time
|
Timestamp of the earliest message in the recording. This marks the beginning of the recorded data timeline.
TYPE:
|
message_end_time
|
Timestamp of the latest message in the recording. Together with
TYPE:
|
channel_message_counts
|
Detailed breakdown of message counts per channel.
TYPE:
|
class Mesh3D
Bases: Mesh3DExt, Archetype, VisualizableArchetype
Archetype: A 3D triangle mesh as specified by its per-mesh and per-vertex properties.
See also archetypes.Asset3D.
If there are multiple archetypes.InstancePoses3D instances logged to the same entity as a mesh,
an instance of the mesh will be drawn for each transform.
For transparency ordering, as well as back face culling (disabled by default), front faces are assumed to be those with counter clockwise triangle winding order (this is the same as in the GLTF specification).
Examples:
Simple indexed 3D mesh:
import rerun as rr
rr.init("rerun_example_mesh3d_indexed", spawn=True)
rr.log(
"triangle",
rr.Mesh3D(
vertex_positions=[[0.0, 1.0, 0.0], [1.0, 0.0, 0.0], [0.0, 0.0, 0.0]],
vertex_normals=[0.0, 0.0, 1.0],
vertex_colors=[[0, 0, 255], [0, 255, 0], [255, 0, 0]],
triangle_indices=[2, 1, 0],
),
)
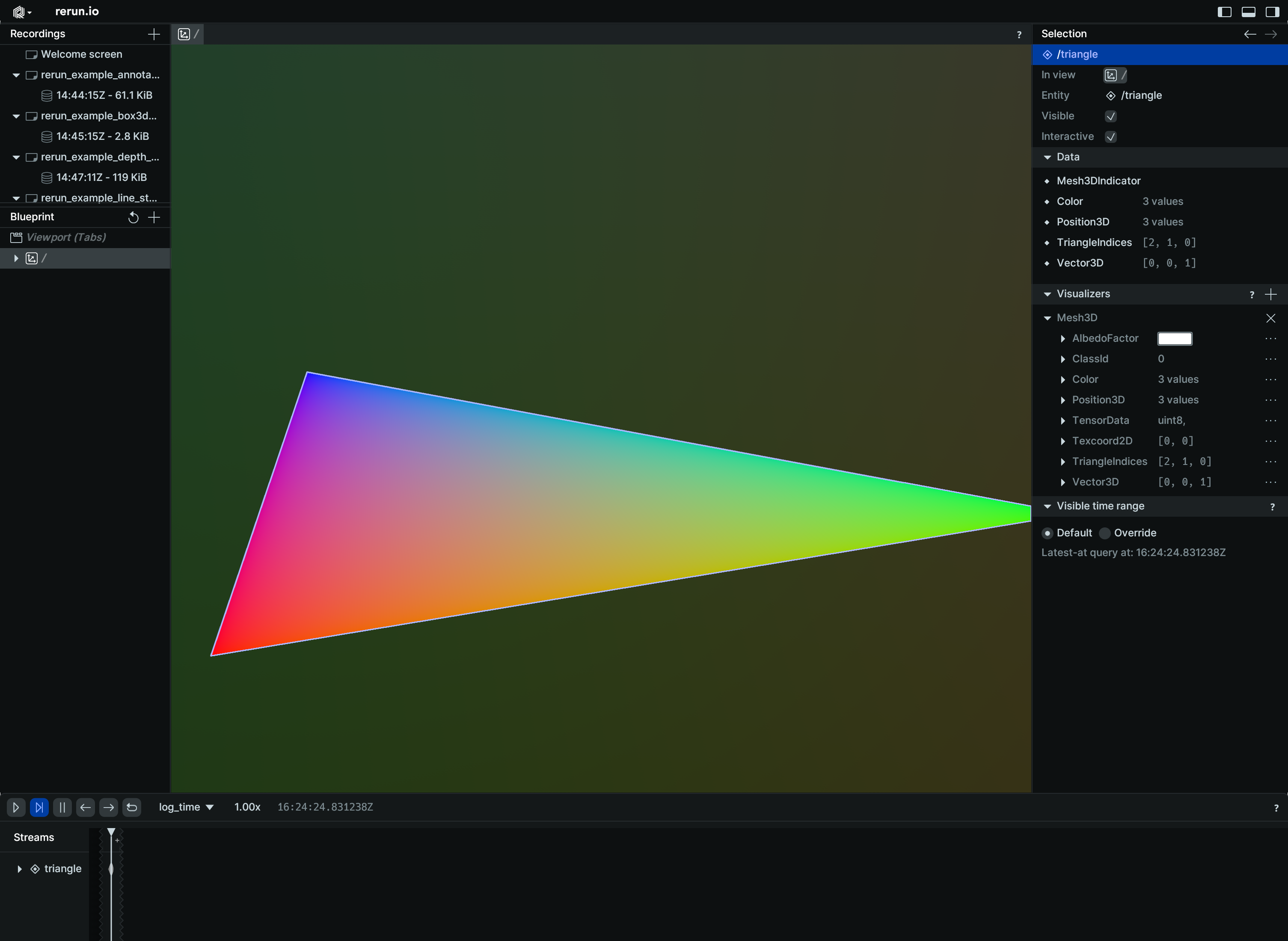
3D mesh with instancing:
import rerun as rr
rr.init("rerun_example_mesh3d_instancing", spawn=True)
rr.set_time("frame", sequence=0)
rr.log(
"shape",
rr.Mesh3D(
vertex_positions=[[1, 1, 1], [-1, -1, 1], [-1, 1, -1], [1, -1, -1]],
triangle_indices=[[0, 2, 1], [0, 3, 1], [0, 3, 2], [1, 3, 2]],
vertex_colors=[[255, 0, 0], [0, 255, 0], [0, 0, 255], [255, 255, 0]],
),
)
# This box will not be affected by its parent's instance poses!
rr.log(
"shape/box",
rr.Boxes3D(half_sizes=[[5.0, 5.0, 5.0]]),
)
for i in range(100):
rr.set_time("frame", sequence=i)
rr.log(
"shape",
rr.InstancePoses3D(
translations=[[2, 0, 0], [0, 2, 0], [0, -2, 0], [-2, 0, 0]],
rotation_axis_angles=rr.RotationAxisAngle([0, 0, 1], rr.Angle(deg=i * 2)),
),
)
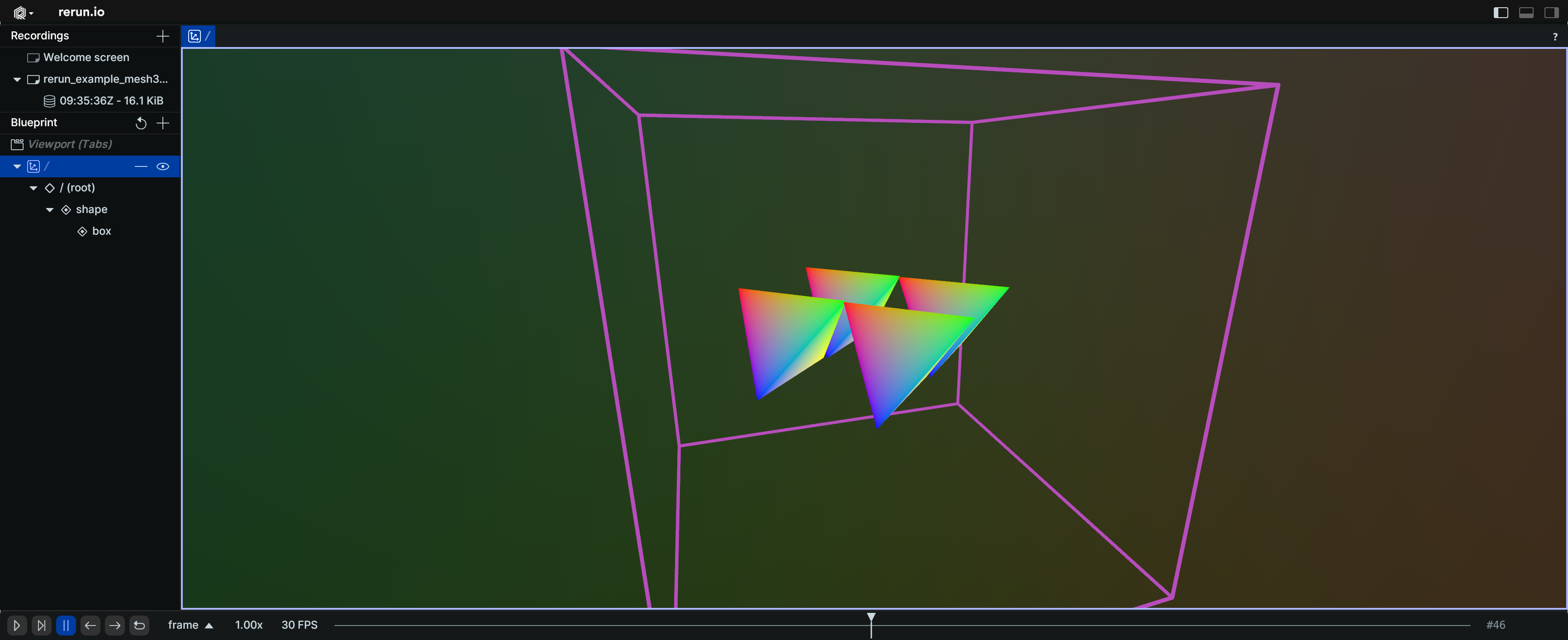
def __init__(*, vertex_positions, triangle_indices=None, vertex_normals=None, vertex_colors=None, vertex_texcoords=None, albedo_texture=None, albedo_factor=None, face_rendering=None, class_ids=None)
Create a new instance of the Mesh3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
vertex_positions
|
The positions of each vertex.
If no
TYPE:
|
triangle_indices
|
Optional indices for the triangles that make up the mesh.
TYPE:
|
vertex_normals
|
An optional normal for each vertex.
If specified, this must have as many elements as
TYPE:
|
vertex_texcoords
|
An optional texture coordinate for each vertex.
If specified, this must have as many elements as
TYPE:
|
vertex_colors
|
An optional color for each vertex.
TYPE:
|
albedo_factor
|
Optional color multiplier for the whole mesh
TYPE:
|
albedo_texture
|
Optional albedo texture. Used with
TYPE:
|
face_rendering
|
Determines which faces of the mesh are rendered.
The default is
TYPE:
|
class_ids
|
Optional class Ids for the vertices. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Mesh3D.
def columns(*, vertex_positions=None, triangle_indices=None, vertex_normals=None, vertex_colors=None, vertex_texcoords=None, albedo_factor=None, face_rendering=None, albedo_texture_buffer=None, albedo_texture_format=None, class_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
vertex_positions
|
The positions of each vertex. If no
TYPE:
|
triangle_indices
|
Optional indices for the triangles that make up the mesh.
TYPE:
|
vertex_normals
|
An optional normal for each vertex.
TYPE:
|
vertex_colors
|
An optional color for each vertex. The alpha channel is ignored.
TYPE:
|
vertex_texcoords
|
An optional uv texture coordinate for each vertex.
TYPE:
|
albedo_factor
|
A color multiplier applied to the whole mesh. Alpha channel governs the overall mesh transparency.
TYPE:
|
face_rendering
|
Determines which faces of the mesh are rendered. The default is
TYPE:
|
albedo_texture_buffer
|
Optional albedo texture. Used with the Currently supports only sRGB(A) textures, ignoring alpha.
(meaning that the tensor must have 3 or 4 channels and use the The alpha channel is ignored.
TYPE:
|
albedo_texture_format
|
The format of the
TYPE:
|
class_ids
|
Optional class Ids for the vertices. The
TYPE:
|
def from_fields(*, clear_unset=False, vertex_positions=None, triangle_indices=None, vertex_normals=None, vertex_colors=None, vertex_texcoords=None, albedo_factor=None, face_rendering=None, albedo_texture_buffer=None, albedo_texture_format=None, class_ids=None)
classmethod
Update only some specific fields of a Mesh3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
vertex_positions
|
The positions of each vertex. If no
TYPE:
|
triangle_indices
|
Optional indices for the triangles that make up the mesh.
TYPE:
|
vertex_normals
|
An optional normal for each vertex.
TYPE:
|
vertex_colors
|
An optional color for each vertex. The alpha channel is ignored.
TYPE:
|
vertex_texcoords
|
An optional uv texture coordinate for each vertex.
TYPE:
|
albedo_factor
|
A color multiplier applied to the whole mesh. Alpha channel governs the overall mesh transparency.
TYPE:
|
face_rendering
|
Determines which faces of the mesh are rendered. The default is
TYPE:
|
albedo_texture_buffer
|
Optional albedo texture. Used with the Currently supports only sRGB(A) textures, ignoring alpha.
(meaning that the tensor must have 3 or 4 channels and use the The alpha channel is ignored.
TYPE:
|
albedo_texture_format
|
The format of the
TYPE:
|
class_ids
|
Optional class Ids for the vertices. The
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Pinhole
Bases: PinholeExt, Archetype, VisualizableArchetype
Archetype: Camera perspective projection (a.k.a. intrinsics).
If archetypes.Transform3D is logged for the same child/parent relationship (e.g. for the camera extrinsics), it takes precedence over archetypes.Pinhole.
If you use named transform frames via the child_frame and parent_frame fields, you don't have to use archetypes.CoordinateFrame
as it is the case with other visualizations: for any entity with an archetypes.Pinhole the viewer will always visualize it
directly without needing a archetypes.CoordinateFrame to refer to the pinhole's child/parent frame.
Examples:
Simple pinhole camera:
import numpy as np
import rerun as rr
rr.init("rerun_example_pinhole", spawn=True)
rng = np.random.default_rng(12345)
image = rng.uniform(0, 255, size=[3, 3, 3])
rr.log("world/image", rr.Pinhole(focal_length=3, width=3, height=3))
rr.log("world/image", rr.Image(image))
Perspective pinhole camera:
import rerun as rr
rr.init("rerun_example_pinhole_perspective", spawn=True)
rr.log(
"world/cam",
rr.Pinhole(
fov_y=0.7853982,
aspect_ratio=1.7777778,
camera_xyz=rr.ViewCoordinates.RUB,
image_plane_distance=0.1,
color=[255, 128, 0],
line_width=0.003,
),
)
rr.log("world/points", rr.Points3D([(0.0, 0.0, -0.5), (0.1, 0.1, -0.5), (-0.1, -0.1, -0.5)], radii=0.025))
def __init__(*, image_from_camera=None, resolution=None, camera_xyz=None, width=None, height=None, focal_length=None, principal_point=None, fov_y=None, aspect_ratio=None, child_frame=None, parent_frame=None, image_plane_distance=None, color=None, line_width=None)
Create a new instance of the Pinhole archetype.
| PARAMETER | DESCRIPTION |
|---|---|
image_from_camera
|
Row-major intrinsics matrix for projecting from camera space to image space.
The first two axes are X=Right and Y=Down, respectively.
Projection is done along the positive third (Z=Forward) axis.
This can be specified instead of
TYPE:
|
resolution
|
Pixel resolution (usually integers) of child image space. Width and height.
TYPE:
|
camera_xyz
|
Sets the view coordinates for the camera. All common values are available as constants on the The default is The camera frustum will point whichever axis is set to The frustum's "up" direction will be whichever axis is set to The frustum's "right" direction will be whichever axis is set to Other common formats are NOTE: setting this to something else than The pinhole matrix (the
TYPE:
|
focal_length
|
The focal length of the camera in pixels. This is the diagonal of the projection matrix. Set one value for symmetric cameras, or two values (X=Right, Y=Down) for anamorphic cameras. |
principal_point
|
The center of the camera in pixels. The default is half the width and height. This is the last column of the projection matrix. Expects two values along the dimensions Right and Down
TYPE:
|
width
|
Width of the image in pixels. |
height
|
Height of the image in pixels. |
fov_y
|
Vertical field of view in radians.
TYPE:
|
aspect_ratio
|
Aspect ratio (width/height).
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time, but is allowed to be different for static time.
E.g. if you specified the child frame If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
image_plane_distance
|
The distance from the camera origin to the image plane when the projection is shown in a 3D viewer. This is only used for visualization purposes, and does not affect the projection itself.
TYPE:
|
color
|
Color of the camera frustum lines in the 3D viewer.
TYPE:
|
line_width
|
Width of the camera frustum lines in the 3D viewer.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Pinhole.
def columns(*, image_from_camera=None, resolution=None, camera_xyz=None, child_frame=None, parent_frame=None, image_plane_distance=None, color=None, line_width=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
image_from_camera
|
Camera projection, from image coordinates to view coordinates. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
resolution
|
Pixel resolution (usually integers) of child image space. Width and height. Example:
Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
camera_xyz
|
Sets the view coordinates for the camera. All common values are available as constants on the The default is The camera frustum will point whichever axis is set to The frustum's "up" direction will be whichever axis is set to The frustum's "right" direction will be whichever axis is set to Other common formats are NOTE: setting this to something else than The pinhole matrix (the
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time, but is allowed to be different for static time.
E.g. if you specified the child frame If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
image_plane_distance
|
The distance from the camera origin to the image plane when the projection is shown in a 3D viewer. This is only used for visualization purposes, and does not affect the projection itself.
TYPE:
|
color
|
Color of the camera wireframe.
TYPE:
|
line_width
|
Width of the camera wireframe lines.
TYPE:
|
def from_fields(*, clear_unset=False, image_from_camera=None, resolution=None, camera_xyz=None, child_frame=None, parent_frame=None, image_plane_distance=None, color=None, line_width=None)
classmethod
Update only some specific fields of a Pinhole.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
image_from_camera
|
Camera projection, from image coordinates to view coordinates. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
resolution
|
Pixel resolution (usually integers) of child image space. Width and height. Example:
Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
camera_xyz
|
Sets the view coordinates for the camera. All common values are available as constants on the The default is The camera frustum will point whichever axis is set to The frustum's "up" direction will be whichever axis is set to The frustum's "right" direction will be whichever axis is set to Other common formats are NOTE: setting this to something else than The pinhole matrix (the
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time, but is allowed to be different for static time.
E.g. if you specified the child frame If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
image_plane_distance
|
The distance from the camera origin to the image plane when the projection is shown in a 3D viewer. This is only used for visualization purposes, and does not affect the projection itself.
TYPE:
|
color
|
Color of the camera wireframe.
TYPE:
|
line_width
|
Width of the camera wireframe lines.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Points2D
Bases: Points2DExt, Archetype, VisualizableArchetype
Archetype: A 2D point cloud with positions and optional colors, radii, labels, etc.
Examples:
Randomly distributed 2D points with varying color and radius:
from numpy.random import default_rng
import rerun as rr
import rerun.blueprint as rrb
rr.init("rerun_example_points2d_random", spawn=True)
rng = default_rng(12345)
positions = rng.uniform(-3, 3, size=[10, 2])
colors = rng.uniform(0, 255, size=[10, 4])
radii = rng.uniform(0, 1, size=[10])
rr.log("random", rr.Points2D(positions, colors=colors, radii=radii))
# Set view bounds:
rr.send_blueprint(rrb.Spatial2DView(visual_bounds=rrb.VisualBounds2D(x_range=[-4, 4], y_range=[-4, 4])))
Log points with radii given in UI points:
import rerun as rr
import rerun.blueprint as rrb
rr.init("rerun_example_points2d_ui_radius", spawn=True)
# Two blue points with scene unit radii of 0.1 and 0.3.
rr.log(
"scene_units",
rr.Points2D(
[[0, 0], [0, 1]],
# By default, radii are interpreted as world-space units.
radii=[0.1, 0.3],
colors=[0, 0, 255],
),
)
# Two red points with ui point radii of 40 and 60.
# UI points are independent of zooming in Views, but are sensitive to the application UI scaling.
# For 100% ui scaling, UI points are equal to pixels.
rr.log(
"ui_points",
rr.Points2D(
[[1, 0], [1, 1]],
# rr.Radius.ui_points produces radii that the viewer interprets as given in ui points.
radii=rr.Radius.ui_points([40.0, 60.0]),
colors=[255, 0, 0],
),
)
# Set view bounds:
rr.send_blueprint(rrb.Spatial2DView(visual_bounds=rrb.VisualBounds2D(x_range=[-1, 2], y_range=[-1, 2])))
def __init__(positions, *, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None, keypoint_ids=None)
Create a new instance of the Points2D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
positions
|
All the 2D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
TYPE:
|
class_ids
|
Optional class Ids for the points. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no class IDs were specified, the class ID will
default to 0.
This is useful to identify points within a single classification (which is identified
with
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Points2D.
def columns(*, positions=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None, keypoint_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
positions
|
All the 2D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no
TYPE:
|
def from_fields(*, clear_unset=False, positions=None, radii=None, colors=None, labels=None, show_labels=None, draw_order=None, class_ids=None, keypoint_ids=None)
classmethod
Update only some specific fields of a Points2D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
positions
|
All the 2D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Points3D
Bases: Points3DExt, Archetype, VisualizableArchetype
Archetype: A 3D point cloud with positions and optional colors, radii, labels, etc.
If there are multiple instance poses, the entire point cloud will be repeated for each of the poses.
Examples:
Simple 3D points:
import rerun as rr
rr.init("rerun_example_points3d", spawn=True)
rr.log("points", rr.Points3D([[0, 0, 0], [1, 1, 1]]))
Update a point cloud over time:
import numpy as np
import rerun as rr
rr.init("rerun_example_points3d_row_updates", spawn=True)
# Prepare a point cloud that evolves over 5 timesteps, changing the number of points in the process.
times = np.arange(10, 15, 1.0)
# fmt: off
positions = [
[[1.0, 0.0, 1.0], [0.5, 0.5, 2.0]],
[[1.5, -0.5, 1.5], [1.0, 1.0, 2.5], [-0.5, 1.5, 1.0], [-1.5, 0.0, 2.0]],
[[2.0, 0.0, 2.0], [1.5, -1.5, 3.0], [0.0, -2.0, 2.5], [1.0, -1.0, 3.5]],
[[-2.0, 0.0, 2.0], [-1.5, 1.5, 3.0], [-1.0, 1.0, 3.5]],
[[1.0, -1.0, 1.0], [2.0, -2.0, 2.0], [3.0, -1.0, 3.0], [2.0, 0.0, 4.0]],
]
# fmt: on
# At each timestep, all points in the cloud share the same but changing color and radius.
colors = [0xFF0000FF, 0x00FF00FF, 0x0000FFFF, 0xFFFF00FF, 0x00FFFFFF]
radii = [0.05, 0.01, 0.2, 0.1, 0.3]
for i in range(5):
rr.set_time("time", duration=10 + i)
rr.log("points", rr.Points3D(positions[i], colors=colors[i], radii=radii[i]))
Update a point cloud over time, in a single operation:
from __future__ import annotations
import numpy as np
import rerun as rr
rr.init("rerun_example_points3d_column_updates", spawn=True)
# Prepare a point cloud that evolves over 5 timesteps, changing the number of points in the process.
times = np.arange(10, 15, 1.0)
# fmt: off
positions = [
[1.0, 0.0, 1.0], [0.5, 0.5, 2.0],
[1.5, -0.5, 1.5], [1.0, 1.0, 2.5], [-0.5, 1.5, 1.0], [-1.5, 0.0, 2.0],
[2.0, 0.0, 2.0], [1.5, -1.5, 3.0], [0.0, -2.0, 2.5], [1.0, -1.0, 3.5],
[-2.0, 0.0, 2.0], [-1.5, 1.5, 3.0], [-1.0, 1.0, 3.5],
[1.0, -1.0, 1.0], [2.0, -2.0, 2.0], [3.0, -1.0, 3.0], [2.0, 0.0, 4.0],
]
# fmt: on
# At each timestep, all points in the cloud share the same but changing color and radius.
colors = [0xFF0000FF, 0x00FF00FF, 0x0000FFFF, 0xFFFF00FF, 0x00FFFFFF]
radii = [0.05, 0.01, 0.2, 0.1, 0.3]
rr.send_columns(
"points",
indexes=[rr.TimeColumn("time", duration=times)],
columns=[
*rr.Points3D.columns(positions=positions).partition(lengths=[2, 4, 4, 3, 4]),
*rr.Points3D.columns(colors=colors, radii=radii),
],
)
Update specific properties of a point cloud over time:
import rerun as rr
rr.init("rerun_example_points3d_partial_updates", spawn=True)
positions = [[i, 0, 0] for i in range(10)]
rr.set_time("frame", sequence=0)
rr.log("points", rr.Points3D(positions))
for i in range(10):
colors = [[20, 200, 20] if n < i else [200, 20, 20] for n in range(10)]
radii = [0.6 if n < i else 0.2 for n in range(10)]
# Update only the colors and radii, leaving everything else as-is.
rr.set_time("frame", sequence=i)
rr.log("points", rr.Points3D.from_fields(radii=radii, colors=colors))
# Update the positions and radii, and clear everything else in the process.
rr.set_time("frame", sequence=20)
rr.log("points", rr.Points3D.from_fields(clear_unset=True, positions=positions, radii=0.3))
def __init__(positions, *, radii=None, colors=None, labels=None, show_labels=None, class_ids=None, keypoint_ids=None)
Create a new instance of the Points3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
positions
|
All the 3D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points.
TYPE:
|
show_labels
|
Optional choice of whether the text labels should be shown by default.
TYPE:
|
class_ids
|
Optional class Ids for the points. The class ID provides colors and labels if not specified explicitly.
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no class IDs were specified, the class ID will
default to 0.
This is useful to identify points within a single classification (which is identified
with
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Points3D.
def columns(*, positions=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None, keypoint_ids=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
positions
|
All the 3D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no
TYPE:
|
def from_fields(*, clear_unset=False, positions=None, radii=None, colors=None, labels=None, show_labels=None, class_ids=None, keypoint_ids=None)
classmethod
Update only some specific fields of a Points3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
positions
|
All the 3D positions at which the point cloud shows points.
TYPE:
|
radii
|
Optional radii for the points, effectively turning them into circles.
TYPE:
|
colors
|
Optional colors for the points. The colors are interpreted as RGB or RGBA in sRGB gamma-space, As either 0-1 floats or 0-255 integers, with separate alpha.
TYPE:
|
labels
|
Optional text labels for the points. If there's a single label present, it will be placed at the center of the entity. Otherwise, each instance will have its own label.
TYPE:
|
show_labels
|
Whether the text labels should be shown. If not set, labels will automatically appear when there is exactly one label for this entity or the number of instances on this entity is under a certain threshold.
TYPE:
|
class_ids
|
Optional class Ids for the points. The
TYPE:
|
keypoint_ids
|
Optional keypoint IDs for the points, identifying them within a class. If keypoint IDs are passed in but no
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class RecordingInfo
Bases: Archetype
Archetype: A list of properties associated with a recording.
def __init__(*, start_time=None, name=None)
Create a new instance of the RecordingInfo archetype.
| PARAMETER | DESCRIPTION |
|---|---|
start_time
|
When the recording started. Should be an absolute time, i.e. relative to Unix Epoch.
TYPE:
|
name
|
A user-chosen name for the recording.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a RecordingInfo.
def columns(*, start_time=None, name=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
start_time
|
When the recording started. Should be an absolute time, i.e. relative to Unix Epoch.
TYPE:
|
name
|
A user-chosen name for the recording.
TYPE:
|
def from_fields(*, clear_unset=False, start_time=None, name=None)
classmethod
Update only some specific fields of a RecordingInfo.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
start_time
|
When the recording started. Should be an absolute time, i.e. relative to Unix Epoch.
TYPE:
|
name
|
A user-chosen name for the recording.
TYPE:
|
class Scalars
Bases: Archetype
Archetype: One or more double-precision scalar values, e.g. for use for time-series plots.
The current timeline value will be used for the time/X-axis, hence scalars should not be static. Number of scalars per timestamp is expected to be the same over time.
When used to produce a plot, this archetype is used to provide the data that
is referenced by archetypes.SeriesLines or archetypes.SeriesPoints. You can do
this by logging both archetypes to the same path, or alternatively configuring
the plot-specific archetypes through the blueprint.
Examples:
Update a scalar over time:
from __future__ import annotations
import math
import rerun as rr
rr.init("rerun_example_scalar_row_updates", spawn=True)
for step in range(64):
rr.set_time("step", sequence=step)
rr.log("scalars", rr.Scalars(math.sin(step / 10.0)))
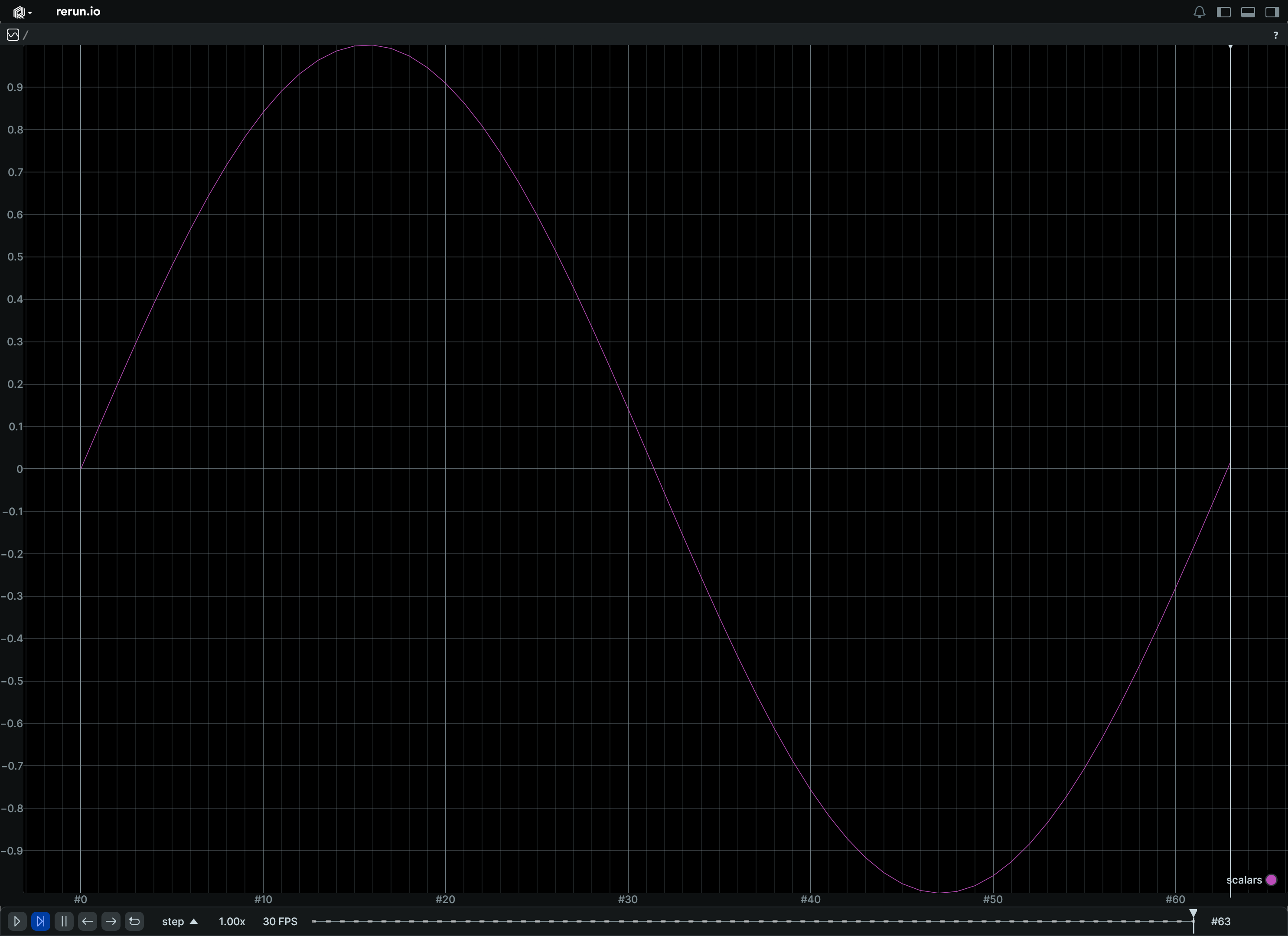
Update a scalar over time, in a single operation:
from __future__ import annotations
import numpy as np
import rerun as rr
rr.init("rerun_example_scalar_column_updates", spawn=True)
times = np.arange(0, 64)
scalars = np.sin(times / 10.0)
rr.send_columns(
"scalars",
indexes=[rr.TimeColumn("step", sequence=times)],
columns=rr.Scalars.columns(scalars=scalars),
)
def __init__(scalars)
Create a new instance of the Scalars archetype.
| PARAMETER | DESCRIPTION |
|---|---|
scalars
|
The scalar values to log.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Scalars.
def columns(*, scalars=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
scalars
|
The scalar values to log.
TYPE:
|
def from_fields(*, clear_unset=False, scalars=None)
classmethod
Update only some specific fields of a Scalars.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
scalars
|
The scalar values to log.
TYPE:
|
class SegmentationImage
Bases: SegmentationImageExt, Archetype, VisualizableArchetype
Archetype: An image made up of integer components.ClassIds.
Each pixel corresponds to a components.ClassId that will be mapped to a color based on archetypes.AnnotationContext.
In the case of floating point images, the label will be looked up based on rounding to the nearest integer value.
Use archetypes.AnnotationContext to associate each class with a color and a label.
Example
Simple segmentation image:
import numpy as np
import rerun as rr
# Create a segmentation image
image = np.zeros((8, 12), dtype=np.uint8)
image[0:4, 0:6] = 1
image[4:8, 6:12] = 2
rr.init("rerun_example_segmentation_image", spawn=True)
# Assign a label and color to each class
rr.log("/", rr.AnnotationContext([(1, "red", (255, 0, 0)), (2, "green", (0, 255, 0))]), static=True)
rr.log("image", rr.SegmentationImage(image))

def cleared()
classmethod
Clear all the fields of a SegmentationImage.
def columns(*, buffer=None, format=None, opacity=None, draw_order=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
buffer
|
The raw image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
opacity
|
Opacity of the image, useful for layering the segmentation image on top of another image. Defaults to 0.5 if there's any other images in the scene, otherwise 1.0.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def from_fields(*, clear_unset=False, buffer=None, format=None, opacity=None, draw_order=None)
classmethod
Update only some specific fields of a SegmentationImage.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
buffer
|
The raw image data.
TYPE:
|
format
|
The format of the image.
TYPE:
|
opacity
|
Opacity of the image, useful for layering the segmentation image on top of another image. Defaults to 0.5 if there's any other images in the scene, otherwise 1.0.
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class SeriesLines
Bases: Archetype, VisualizableArchetype
Archetype: Define the style properties for one or more line series in a chart.
This archetype only provides styling information. Changes over time are supported for most but not all its fields (see respective fields for details), it's generally recommended to log this type as static.
The underlying data needs to be logged to the same entity-path using archetypes.Scalars.
Dimensionality of the scalar arrays logged at each time point is assumed to be the same over time.
Example
Line series:
from math import cos, sin, tau
import rerun as rr
rr.init("rerun_example_series_line_style", spawn=True)
# Set up plot styling:
# They are logged as static as they don't change over time and apply to all timelines.
# Log two lines series under a shared root so that they show in the same plot by default.
rr.log("trig/sin", rr.SeriesLines(colors=[255, 0, 0], names="sin(0.01t)", widths=2), static=True)
rr.log("trig/cos", rr.SeriesLines(colors=[0, 255, 0], names="cos(0.01t)", widths=4), static=True)
# Log the data on a timeline called "step".
for t in range(int(tau * 2 * 100.0)):
rr.set_time("step", sequence=t)
rr.log("trig/sin", rr.Scalars(sin(float(t) / 100.0)))
rr.log("trig/cos", rr.Scalars(cos(float(t) / 100.0)))

def __init__(*, colors=None, widths=None, names=None, visible_series=None, aggregation_policy=None, interpolation_mode=None)
Create a new instance of the SeriesLines archetype.
| PARAMETER | DESCRIPTION |
|---|---|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
widths
|
Stroke width for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time, but can cause discontinuities in the line.
TYPE:
|
aggregation_policy
|
Configures the zoom-dependent scalar aggregation. This is done only if steps on the X axis go below a single pixel, i.e. a single pixel covers more than one tick worth of data. It can greatly improve performance (and readability) in such situations as it prevents overdraw. Expected to be unchanging over time.
TYPE:
|
interpolation_mode
|
Specifies how values between data points are interpolated. Defaults to linear interpolation. Use one of the Expected to be unchanging over time.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a SeriesLines.
def columns(*, colors=None, widths=None, names=None, visible_series=None, aggregation_policy=None, interpolation_mode=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
widths
|
Stroke width for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time, but can cause discontinuities in the line.
TYPE:
|
aggregation_policy
|
Configures the zoom-dependent scalar aggregation. This is done only if steps on the X axis go below a single pixel, i.e. a single pixel covers more than one tick worth of data. It can greatly improve performance (and readability) in such situations as it prevents overdraw. Expected to be unchanging over time.
TYPE:
|
interpolation_mode
|
Specifies how values between data points are interpolated. Defaults to linear interpolation. Use one of the Expected to be unchanging over time.
TYPE:
|
def from_fields(*, clear_unset=False, colors=None, widths=None, names=None, visible_series=None, aggregation_policy=None, interpolation_mode=None)
classmethod
Update only some specific fields of a SeriesLines.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
widths
|
Stroke width for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time, but can cause discontinuities in the line.
TYPE:
|
aggregation_policy
|
Configures the zoom-dependent scalar aggregation. This is done only if steps on the X axis go below a single pixel, i.e. a single pixel covers more than one tick worth of data. It can greatly improve performance (and readability) in such situations as it prevents overdraw. Expected to be unchanging over time.
TYPE:
|
interpolation_mode
|
Specifies how values between data points are interpolated. Defaults to linear interpolation. Use one of the Expected to be unchanging over time.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class SeriesPoints
Bases: SeriesPointsExt, Archetype, VisualizableArchetype
Archetype: Define the style properties for one or more point series (scatter plot) in a chart.
This archetype only provides styling information. Changes over time are supported for most but not all its fields (see respective fields for details), it's generally recommended to log this type as static.
The underlying data needs to be logged to the same entity-path using archetypes.Scalars.
Dimensionality of the scalar arrays logged at each time point is assumed to be the same over time.
Example
Point series:
from math import cos, sin, tau
import rerun as rr
rr.init("rerun_example_series_point_style", spawn=True)
# Set up plot styling:
# They are logged as static as they don't change over time and apply to all timelines.
# Log two point series under a shared root so that they show in the same plot by default.
rr.log(
"trig/sin",
rr.SeriesPoints(
colors=[255, 0, 0],
names="sin(0.01t)",
markers="circle",
marker_sizes=4,
),
static=True,
)
rr.log(
"trig/cos",
rr.SeriesPoints(
colors=[0, 255, 0],
names="cos(0.01t)",
markers="cross",
marker_sizes=2,
),
static=True,
)
# Log the data on a timeline called "step".
for t in range(int(tau * 2 * 10.0)):
rr.set_time("step", sequence=t)
rr.log("trig/sin", rr.Scalars(sin(float(t) / 10.0)))
rr.log("trig/cos", rr.Scalars(cos(float(t) / 10.0)))
def __init__(*, colors=None, markers=None, names=None, visible_series=None, marker_sizes=None)
Create a new instance of the SeriesPoints archetype.
| PARAMETER | DESCRIPTION |
|---|---|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
markers
|
What shape to use to represent the point May change over time.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time.
TYPE:
|
marker_sizes
|
Sizes of the markers. May change over time. If no other components are set, a default
TYPE:
|
def cleared()
classmethod
Clear all the fields of a SeriesPoints.
def columns(*, colors=None, markers=None, names=None, visible_series=None, marker_sizes=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
markers
|
What shape to use to represent the point May change over time.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time.
TYPE:
|
marker_sizes
|
Sizes of the markers. May change over time.
TYPE:
|
def from_fields(*, clear_unset=False, colors=None, markers=None, names=None, visible_series=None, marker_sizes=None)
classmethod
Update only some specific fields of a SeriesPoints.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
colors
|
Color for the corresponding series. May change over time, but can cause discontinuities in the line.
TYPE:
|
markers
|
What shape to use to represent the point May change over time.
TYPE:
|
names
|
Display name of the series. Used in the legend. Expected to be unchanging over time.
TYPE:
|
visible_series
|
Which lines are visible. If not set, all line series on this entity are visible. Unlike with the regular visibility property of the entire entity, any series that is hidden via this property will still be visible in the legend. May change over time.
TYPE:
|
marker_sizes
|
Sizes of the markers. May change over time.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Tensor
Bases: TensorExt, Archetype, VisualizableArchetype
Archetype: An N-dimensional array of numbers.
It's not currently possible to use send_columns with tensors since construction
of rerun.components.TensorDataBatch does not support more than a single element.
This will be addressed as part of https://github.com/rerun-io/rerun/issues/6832.
Example
Simple tensor:
import numpy as np
import rerun as rr
tensor = np.random.randint(0, 256, (8, 6, 3, 5), dtype=np.uint8) # 4-dimensional tensor
rr.init("rerun_example_tensor", spawn=True)
# Log the tensor, assigning names to each dimension
rr.log("tensor", rr.Tensor(tensor, dim_names=("width", "height", "channel", "batch")))
def __init__(data=None, *, dim_names=None, value_range=None)
Construct a Tensor archetype.
The Tensor archetype internally contains a single component: TensorData.
See the TensorData constructor for more advanced options to interpret buffers
as TensorData of varying shapes.
For simple cases, you can pass array objects and optionally specify the names of
the dimensions. The shape of the TensorData will be inferred from the array.
| PARAMETER | DESCRIPTION |
|---|---|
self
|
The TensorData object to construct.
TYPE:
|
data
|
A TensorData object, or type that can be converted to a numpy array.
TYPE:
|
dim_names
|
The names of the tensor dimensions when generating the shape from an array. |
value_range
|
The range of values to use for colormapping. If not specified, the range will be estimated from the data.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Tensor.
def columns(*, data=None, value_range=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
data
|
The tensor data
TYPE:
|
value_range
|
The expected range of values. This is typically the expected range of valid values. Everything outside of the range is clamped to the range for the purpose of colormpaping. Any colormap applied for display, will map this range. If not specified, the range will be automatically estimated from the data. Note that the Viewer may try to guess a wider range than the minimum/maximum of values in the contents of the tensor. E.g. if all values are positive, some bigger than 1.0 and all smaller than 255.0, the Viewer will guess that the data likely came from an 8bit image, thus assuming a range of 0-255.
TYPE:
|
def from_fields(*, clear_unset=False, data=None, value_range=None)
classmethod
Update only some specific fields of a Tensor.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
data
|
The tensor data
TYPE:
|
value_range
|
The expected range of values. This is typically the expected range of valid values. Everything outside of the range is clamped to the range for the purpose of colormpaping. Any colormap applied for display, will map this range. If not specified, the range will be automatically estimated from the data. Note that the Viewer may try to guess a wider range than the minimum/maximum of values in the contents of the tensor. E.g. if all values are positive, some bigger than 1.0 and all smaller than 255.0, the Viewer will guess that the data likely came from an 8bit image, thus assuming a range of 0-255.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class TextDocument
Bases: Archetype, VisualizableArchetype
Archetype: A text element intended to be displayed in its own text box.
Supports raw text and markdown.
Example
Markdown text document:
import rerun as rr
rr.init("rerun_example_text_document", spawn=True)
rr.log("text_document", rr.TextDocument("Hello, TextDocument!"))
rr.log(
"markdown",
rr.TextDocument(
'''
# Hello Markdown!
[Click here to see the raw text](recording://markdown:Text).
Basic formatting:
| **Feature** | **Alternative** |
| ----------------- | --------------- |
| Plain | |
| *italics* | _italics_ |
| **bold** | __bold__ |
| ~~strikethrough~~ | |
| `inline code` | |
----------------------------------
## Support
- [x] [Commonmark](https://commonmark.org/help/) support
- [x] GitHub-style strikethrough, tables, and checkboxes
- Basic syntax highlighting for:
- [x] C and C++
- [x] Python
- [x] Rust
- [ ] Other languages
## Links
You can link to [an entity](recording://markdown),
a [specific instance of an entity](recording://markdown[#0]),
or a [specific component](recording://markdown:Text).
Of course you can also have [normal https links](https://github.com/rerun-io/rerun), e.g. <https://rerun.io>.
## Image

'''.strip(),
media_type=rr.MediaType.MARKDOWN,
),
)
def __init__(text, *, media_type=None)
def cleared()
classmethod
Clear all the fields of a TextDocument.
def columns(*, text=None, media_type=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
text
|
Contents of the text document.
TYPE:
|
media_type
|
The Media Type of the text. For instance:
* If omitted,
TYPE:
|
def from_fields(*, clear_unset=False, text=None, media_type=None)
classmethod
Update only some specific fields of a TextDocument.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
text
|
Contents of the text document.
TYPE:
|
media_type
|
The Media Type of the text. For instance:
* If omitted,
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class TextLog
Bases: Archetype, VisualizableArchetype
Archetype: A log entry in a text log, comprised of a text body and its log level.
Example
text_log_integration:
import logging
import rerun as rr
rr.init("rerun_example_text_log_integration", spawn=True)
# Log a text entry directly
rr.log("logs", rr.TextLog("this entry has loglevel TRACE", level=rr.TextLogLevel.TRACE))
# Or log via a logging handler
logging.getLogger().addHandler(rr.LoggingHandler("logs/handler"))
logging.getLogger().setLevel(-1)
logging.info("This INFO log got added through the standard logging interface")
def __init__(text, *, level=None, color=None)
Create a new instance of the TextLog archetype.
| PARAMETER | DESCRIPTION |
|---|---|
text
|
The body of the message.
TYPE:
|
level
|
The verbosity level of the message. This can be used to filter the log messages in the Rerun Viewer.
TYPE:
|
color
|
Optional color to use for the log line in the Rerun Viewer.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a TextLog.
def columns(*, text=None, level=None, color=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
text
|
The body of the message.
TYPE:
|
level
|
The verbosity level of the message. This can be used to filter the log messages in the Rerun Viewer.
TYPE:
|
color
|
Optional color to use for the log line in the Rerun Viewer.
TYPE:
|
def from_fields(*, clear_unset=False, text=None, level=None, color=None)
classmethod
Update only some specific fields of a TextLog.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
text
|
The body of the message.
TYPE:
|
level
|
The verbosity level of the message. This can be used to filter the log messages in the Rerun Viewer.
TYPE:
|
color
|
Optional color to use for the log line in the Rerun Viewer.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class Transform3D
Bases: Transform3DExt, Archetype
Archetype: A transform between two 3D spaces, i.e. a pose.
From the point of view of the entity's coordinate system, all components are applied in the inverse order they are listed here. E.g. if both a translation and a mat3x3 transform are present, the 3x3 matrix is applied first, followed by the translation.
Whenever you log this archetype, the state of the resulting transform relationship is fully reset to the new archetype. This means that if you first log a transform with only a translation, and then log one with only a rotation, it will be resolved to a transform with only a rotation. (This is unlike how we usually apply latest-at semantics on an archetype where we take the latest state of any component independently)
For transforms that affect only a single entity and do not propagate along the entity tree refer to archetypes.InstancePoses3D.
Examples:
Variety of 3D transforms:
from math import pi
import rerun as rr
from rerun.datatypes import Angle, RotationAxisAngle
rr.init("rerun_example_transform3d", spawn=True)
arrow = rr.Arrows3D(origins=[0, 0, 0], vectors=[0, 1, 0])
rr.log("base", arrow)
rr.log("base/translated", rr.Transform3D(translation=[1, 0, 0]))
rr.log("base/translated", arrow)
rr.log(
"base/rotated_scaled",
rr.Transform3D(
rotation=RotationAxisAngle(axis=[0, 0, 1], angle=Angle(rad=pi / 4)),
scale=2,
),
)
rr.log("base/rotated_scaled", arrow)
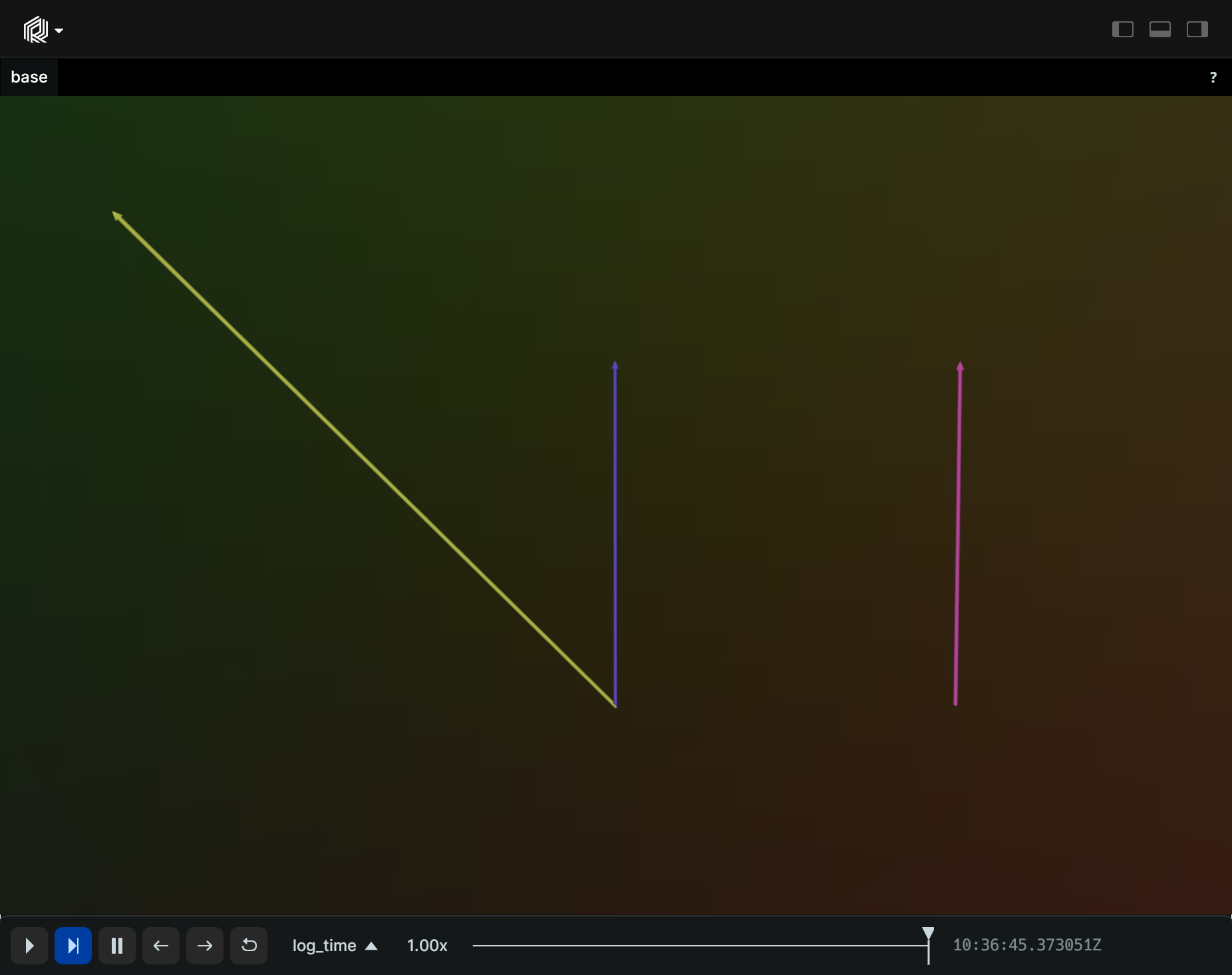
Update a transform over time:
import math
import rerun as rr
def truncated_radians(deg: float) -> float:
return float(int(math.radians(deg) * 1000.0)) / 1000.0
rr.init("rerun_example_transform3d_row_updates", spawn=True)
rr.set_time("tick", sequence=0)
rr.log(
"box",
rr.Boxes3D(half_sizes=[4.0, 2.0, 1.0], fill_mode=rr.components.FillMode.Solid),
rr.TransformAxes3D(10.0),
)
for t in range(100):
rr.set_time("tick", sequence=t + 1)
rr.log(
"box",
rr.Transform3D(
translation=[0, 0, t / 10.0],
rotation_axis_angle=rr.RotationAxisAngle(axis=[0.0, 1.0, 0.0], radians=truncated_radians(t * 4)),
),
)
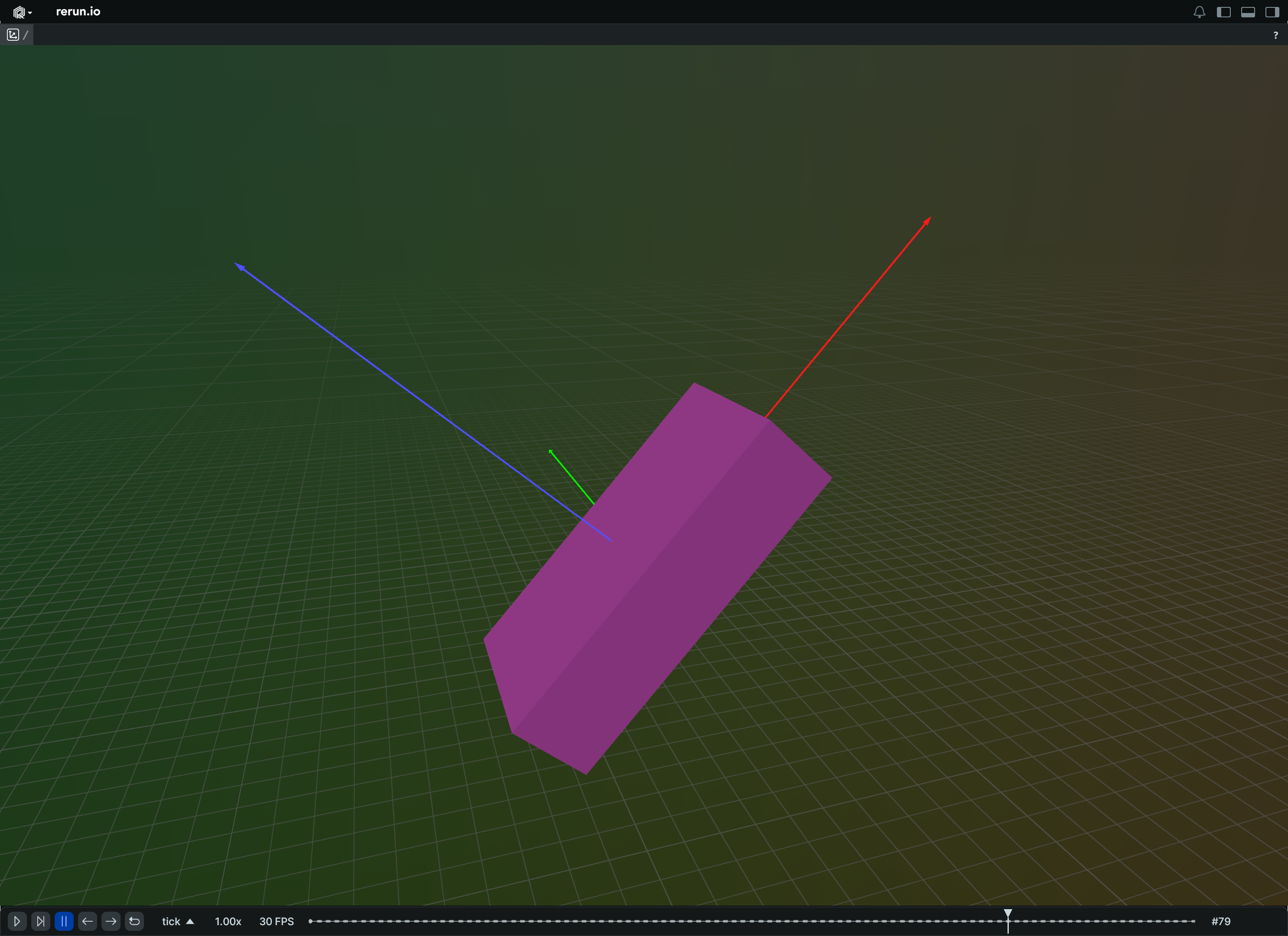
Update a transform over time, in a single operation:
import math
import rerun as rr
def truncated_radians(deg: float) -> float:
return float(int(math.radians(deg) * 1000.0)) / 1000.0
rr.init("rerun_example_transform3d_column_updates", spawn=True)
rr.set_time("tick", sequence=0)
rr.log(
"box",
rr.Boxes3D(half_sizes=[4.0, 2.0, 1.0], fill_mode=rr.components.FillMode.Solid),
rr.TransformAxes3D(10.0),
)
rr.send_columns(
"box",
indexes=[rr.TimeColumn("tick", sequence=range(1, 101))],
columns=rr.Transform3D.columns(
translation=[[0, 0, t / 10.0] for t in range(100)],
rotation_axis_angle=[
rr.RotationAxisAngle(axis=[0.0, 1.0, 0.0], radians=truncated_radians(t * 4)) for t in range(100)
],
),
)
Update specific properties of a transform over time:
import math
import rerun as rr
def truncated_radians(deg: float) -> float:
return float(int(math.radians(deg) * 1000.0)) / 1000.0
rr.init("rerun_example_transform3d_partial_updates", spawn=True)
# Set up a 3D box.
rr.log(
"box",
rr.Boxes3D(half_sizes=[4.0, 2.0, 1.0], fill_mode=rr.components.FillMode.Solid),
)
# Update only the rotation of the box.
for deg in range(46):
rad = truncated_radians(deg * 4)
rr.log(
"box",
rr.Transform3D.from_fields(
rotation_axis_angle=rr.RotationAxisAngle(axis=[0.0, 1.0, 0.0], radians=rad),
),
)
# Update only the position of the box.
for t in range(51):
rr.log(
"box",
rr.Transform3D.from_fields(translation=[0, 0, t / 10.0]),
)
# Update only the rotation of the box.
for deg in range(46):
rad = truncated_radians((deg + 45) * 4)
rr.log(
"box",
rr.Transform3D.from_fields(
rotation_axis_angle=rr.RotationAxisAngle(axis=[0.0, 1.0, 0.0], radians=rad),
),
)
# Clear all of the box's attributes.
rr.log(
"box",
rr.Transform3D.from_fields(clear_unset=True),
)
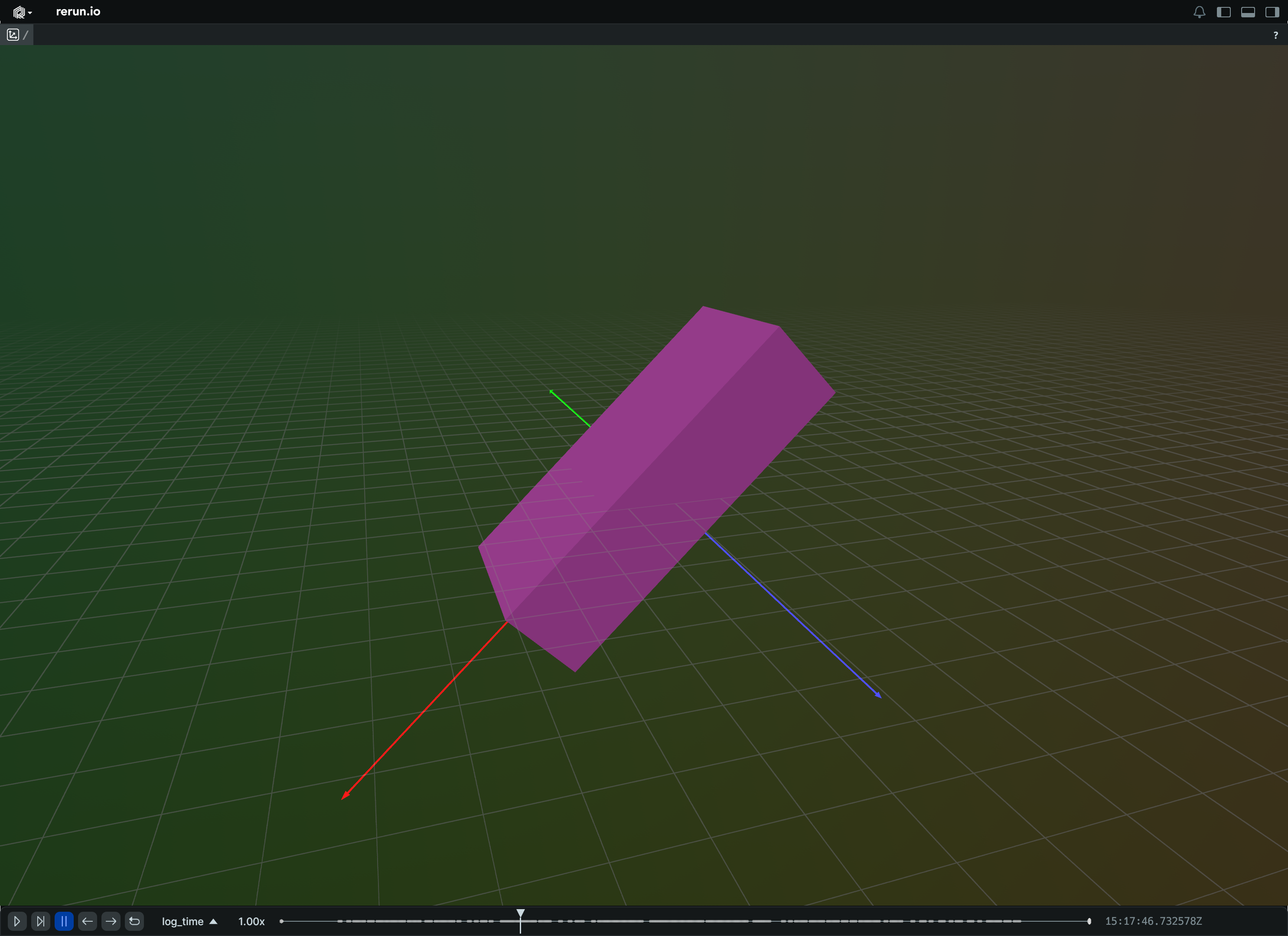
def __init__(*, translation=None, rotation=None, rotation_axis_angle=None, quaternion=None, scale=None, mat3x3=None, from_parent=None, relation=None, child_frame=None, parent_frame=None)
Create a new instance of the Transform3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
translation
|
3D translation vector.
TYPE:
|
rotation
|
3D rotation, either a quaternion or an axis-angle.
Mutually exclusive with
TYPE:
|
rotation_axis_angle
|
Axis-angle representing rotation. Mutually exclusive with
TYPE:
|
quaternion
|
Quaternion representing rotation. Mutually exclusive with
TYPE:
|
scale
|
3D scale.
TYPE:
|
mat3x3
|
3x3 matrix representing scale and rotation, applied after translation.
Not compatible with
TYPE:
|
from_parent
|
If true, the transform maps from the parent space to the space where the transform was logged.
Otherwise, the transform maps from the space to its parent.
Deprecated in favor of Mutually exclusive with
TYPE:
|
relation
|
Allows to explicitly specify the transform's relationship with the parent entity. Otherwise, the transform maps from the space to its parent. Mutually exclusive with
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time.
E.g. if you specified the child frame ⚠ This currently also affects the child frame of If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. ⚠ This currently also affects the parent frame of If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see
TYPE:
|
def cleared()
classmethod
Clear all the fields of a Transform3D.
def columns(*, translation=None, rotation_axis_angle=None, quaternion=None, scale=None, mat3x3=None, relation=None, child_frame=None, parent_frame=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
translation
|
Translation vector. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
rotation_axis_angle
|
Rotation via axis + angle. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
quaternion
|
Rotation via quaternion. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
scale
|
Scaling factor. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
mat3x3
|
3x3 transformation matrix. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
relation
|
Specifies the relation this transform establishes between this entity and its parent. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time, but is allowed to be different for static time.
E.g. if you specified the child frame If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
def from_fields(*, clear_unset=False, translation=None, rotation_axis_angle=None, quaternion=None, scale=None, mat3x3=None, relation=None, child_frame=None, parent_frame=None)
classmethod
Update only some specific fields of a Transform3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
translation
|
Translation vector. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
rotation_axis_angle
|
Rotation via axis + angle. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
quaternion
|
Rotation via quaternion. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
scale
|
Scaling factor. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
mat3x3
|
3x3 transformation matrix. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
relation
|
Specifies the relation this transform establishes between this entity and its parent. Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
child_frame
|
The child frame this transform transforms from. The entity at which the transform relationship of any given child frame is specified mustn't change over time, but is allowed to be different for static time.
E.g. if you specified the child frame If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
parent_frame
|
The parent frame this transform transforms into. If not specified, this is set to the implicit transform frame of the current entity path's parent.
This means that if a To set the frame an entity is part of see Any update to this field will reset all other transform properties that aren't changed in the same log call or
TYPE:
|
class TransformAxes3D
Bases: Archetype, VisualizableArchetype
Archetype: A visual representation of a archetypes.Transform3D.
Example
Visual representation of a transform as three arrows:
import rerun as rr
rr.init("rerun_example_transform3d_axes", spawn=True)
rr.set_time("step", sequence=0)
# Set the axis lengths for all the transforms
rr.log("base", rr.Transform3D(), rr.TransformAxes3D(1.0))
# Now sweep out a rotation relative to the base
for deg in range(360):
rr.set_time("step", sequence=deg)
rr.log(
"base/rotated",
rr.Transform3D.from_fields(
rotation_axis_angle=rr.RotationAxisAngle(
axis=[1.0, 1.0, 1.0],
degrees=deg,
),
),
rr.TransformAxes3D(0.5),
)
rr.log(
"base/rotated/translated",
rr.Transform3D.from_fields(
translation=[2.0, 0, 0],
),
rr.TransformAxes3D(0.5),
)
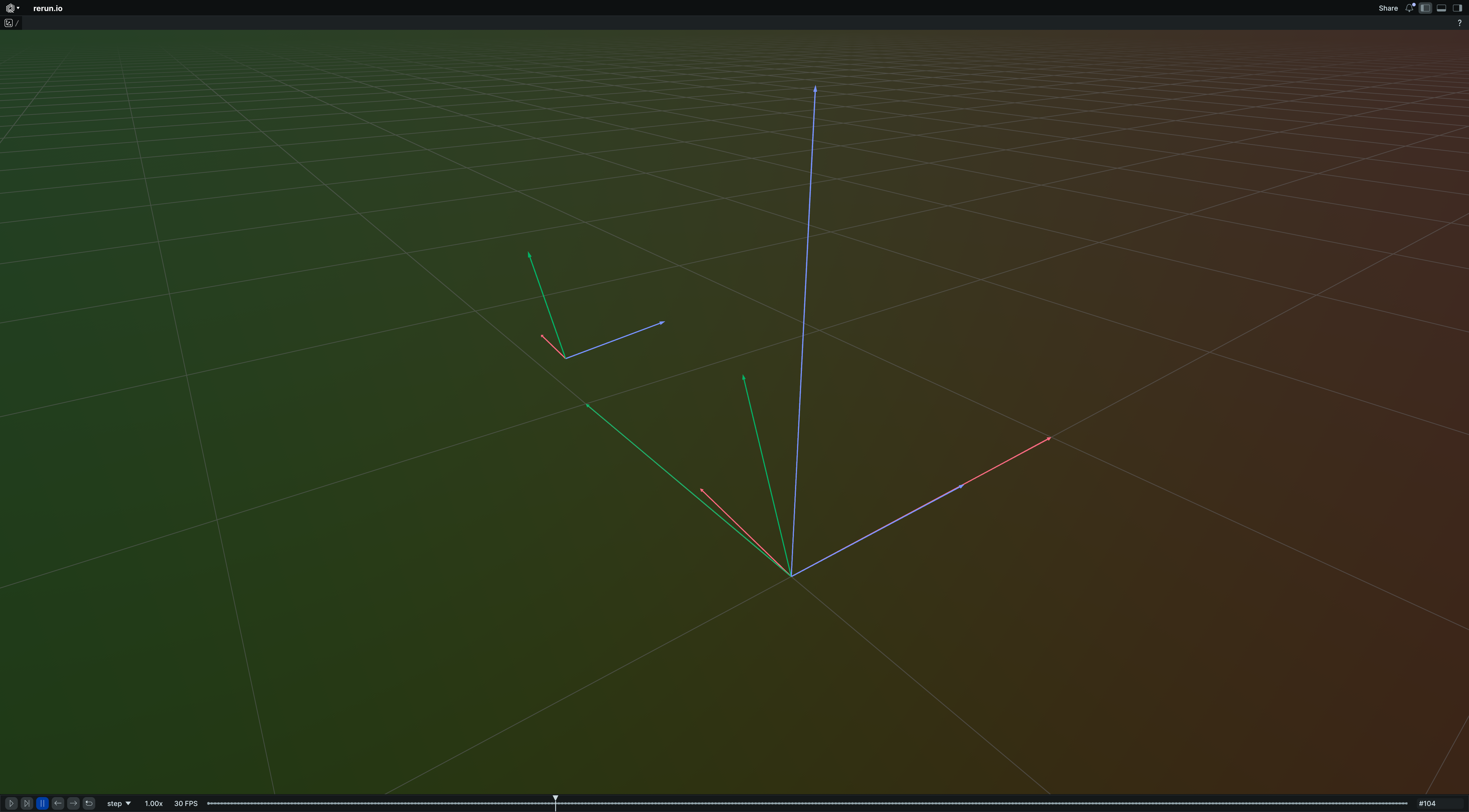
def __init__(axis_length, *, show_frame=None)
Create a new instance of the TransformAxes3D archetype.
| PARAMETER | DESCRIPTION |
|---|---|
axis_length
|
Visual length of the 3 axes. The length is interpreted in the local coordinate system of the transform. If the transform is scaled, the axes will be scaled accordingly.
TYPE:
|
show_frame
|
Whether to show a text label with the corresponding frame.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a TransformAxes3D.
def columns(*, axis_length=None, show_frame=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
axis_length
|
Visual length of the 3 axes. The length is interpreted in the local coordinate system of the transform. If the transform is scaled, the axes will be scaled accordingly.
TYPE:
|
show_frame
|
Whether to show a text label with the corresponding frame.
TYPE:
|
def from_fields(*, clear_unset=False, axis_length=None, show_frame=None)
classmethod
Update only some specific fields of a TransformAxes3D.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
axis_length
|
Visual length of the 3 axes. The length is interpreted in the local coordinate system of the transform. If the transform is scaled, the axes will be scaled accordingly.
TYPE:
|
show_frame
|
Whether to show a text label with the corresponding frame.
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class VideoFrameReference
Bases: VideoFrameReferenceExt, Archetype, VisualizableArchetype
Archetype: References a single video frame.
Used to display individual video frames from a archetypes.AssetVideo.
To show an entire video, a video frame reference for each frame of the video should be logged.
See https://rerun.io/docs/reference/video for details of what is and isn't supported.
TODO(#10422): archetypes.VideoFrameReference does not yet work with archetypes.VideoStream.
Examples:
Video with automatically determined frames:
import sys
import rerun as rr
if len(sys.argv) < 2:
# TODO(#7354): Only mp4 is supported for now.
print(f"Usage: {sys.argv[0]} <path_to_video.[mp4]>")
sys.exit(1)
rr.init("rerun_example_asset_video_auto_frames", spawn=True)
# Log video asset which is referred to by frame references.
video_asset = rr.AssetVideo(path=sys.argv[1])
rr.log("video", video_asset, static=True)
# Send automatically determined video frame timestamps.
frame_timestamps_ns = video_asset.read_frame_timestamps_nanos()
rr.send_columns(
"video",
# Note timeline values don't have to be the same as the video timestamps.
indexes=[rr.TimeColumn("video_time", duration=1e-9 * frame_timestamps_ns)],
columns=rr.VideoFrameReference.columns_nanos(frame_timestamps_ns),
)
Demonstrates manual use of video frame references:
import sys
import rerun as rr
import rerun.blueprint as rrb
if len(sys.argv) < 2:
# TODO(#7354): Only mp4 is supported for now.
print(f"Usage: {sys.argv[0]} <path_to_video.[mp4]>")
sys.exit(1)
rr.init("rerun_example_asset_video_manual_frames", spawn=True)
# Log video asset which is referred to by frame references.
rr.log("video_asset", rr.AssetVideo(path=sys.argv[1]), static=True)
# Create two entities, showing the same video frozen at different times.
rr.log(
"frame_1s",
rr.VideoFrameReference(seconds=1.0, video_reference="video_asset"),
)
rr.log(
"frame_2s",
rr.VideoFrameReference(seconds=2.0, video_reference="video_asset"),
)
# Send blueprint that shows two 2D views next to each other.
rr.send_blueprint(rrb.Horizontal(rrb.Spatial2DView(origin="frame_1s"), rrb.Spatial2DView(origin="frame_2s")))
def __init__(timestamp=None, *, seconds=None, nanoseconds=None, video_reference=None, opacity=None, draw_order=None)
Create a new instance of the VideoFrameReference archetype.
| PARAMETER | DESCRIPTION |
|---|---|
timestamp
|
References the closest video frame to this timestamp. Note that this uses the closest video frame instead of the latest at this timestamp in order to be more forgiving of rounding errors for inprecise timestamp types. Mutually exclusive with
TYPE:
|
seconds
|
Sets the timestamp to the given number of seconds. Mutually exclusive with
TYPE:
|
nanoseconds
|
Sets the timestamp to the given number of nanoseconds. Mutually exclusive with
TYPE:
|
video_reference
|
Optional reference to an entity with a If none is specified, the video is assumed to be at the same entity. Note that blueprint overrides on the referenced video will be ignored regardless, as this is always interpreted as a reference to the data store. For a series of video frame references, it is recommended to specify this path only once at the beginning of the series and then rely on latest-at query semantics to keep the video reference active.
TYPE:
|
opacity
|
Opacity of the video, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def cleared()
classmethod
Clear all the fields of a VideoFrameReference.
def columns(*, timestamp=None, video_reference=None, opacity=None, draw_order=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
timestamp
|
References the closest video frame to this timestamp. Note that this uses the closest video frame instead of the latest at this timestamp in order to be more forgiving of rounding errors for inprecise timestamp types. Timestamps are relative to the start of the video, i.e. a timestamp of 0 always corresponds to the first frame. This is oftentimes equivalent to presentation timestamps (known as PTS), but in the presence of B-frames (bidirectionally predicted frames) there may be an offset on the first presentation timestamp in the video.
TYPE:
|
video_reference
|
Optional reference to an entity with a If none is specified, the video is assumed to be at the same entity. Note that blueprint overrides on the referenced video will be ignored regardless, as this is always interpreted as a reference to the data store. For a series of video frame references, it is recommended to specify this path only once at the beginning of the series and then rely on latest-at query semantics to keep the video reference active.
TYPE:
|
opacity
|
Opacity of the video, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def columns_millis(milliseconds)
classmethod
Helper for VideoFrameReference.columns with milliseconds-based timestamp.
| PARAMETER | DESCRIPTION |
|---|---|
milliseconds
|
Timestamp values in milliseconds since video start.
TYPE:
|
def columns_nanos(nanoseconds)
classmethod
Helper for VideoFrameReference.columns with nanoseconds-based timestamp.
| PARAMETER | DESCRIPTION |
|---|---|
nanoseconds
|
Timestamp values in nanoseconds since video start.
TYPE:
|
def columns_secs(seconds)
classmethod
Helper for VideoFrameReference.columns with seconds-based timestamp.
| PARAMETER | DESCRIPTION |
|---|---|
seconds
|
Timestamp values in seconds since video start.
TYPE:
|
def from_fields(*, clear_unset=False, timestamp=None, video_reference=None, opacity=None, draw_order=None)
classmethod
Update only some specific fields of a VideoFrameReference.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
timestamp
|
References the closest video frame to this timestamp. Note that this uses the closest video frame instead of the latest at this timestamp in order to be more forgiving of rounding errors for inprecise timestamp types. Timestamps are relative to the start of the video, i.e. a timestamp of 0 always corresponds to the first frame. This is oftentimes equivalent to presentation timestamps (known as PTS), but in the presence of B-frames (bidirectionally predicted frames) there may be an offset on the first presentation timestamp in the video.
TYPE:
|
video_reference
|
Optional reference to an entity with a If none is specified, the video is assumed to be at the same entity. Note that blueprint overrides on the referenced video will be ignored regardless, as this is always interpreted as a reference to the data store. For a series of video frame references, it is recommended to specify this path only once at the beginning of the series and then rely on latest-at query semantics to keep the video reference active.
TYPE:
|
opacity
|
Opacity of the video, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class VideoStream
Bases: Archetype, VisualizableArchetype
Archetype: Video stream consisting of raw video chunks.
For logging video containers like mp4, refer to archetypes.AssetVideo and archetypes.VideoFrameReference.
To learn more about video support in Rerun, check the video reference.
All components except sample are typically logged statically once per entity.
sample is then logged repeatedly for each frame on the timeline.
TODO(#10422): archetypes.VideoFrameReference does not yet work with archetypes.VideoStream.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
Example
Live streaming of on-the-fly encoded video:
import av
import numpy as np
import numpy.typing as npt
import rerun as rr
fps = 30
duration_seconds = 4
width = 480
height = 320
ball_radius = 30
codec = rr.VideoCodec.H265 # rr.VideoCodec.H264
formats = {rr.VideoCodec.H265: "hevc", rr.VideoCodec.H264: "h264"}
encoders = {rr.VideoCodec.H265: "libx265", rr.VideoCodec.H264: "libx264"}
def create_example_video_frame(frame_i: int) -> npt.NDArray[np.uint8]:
img = np.zeros((height, width, 3), dtype=np.uint8)
for h in range(height):
img[h, :] = [0, int(100 * h / height), int(200 * h / height)] # Blue to purple gradient.
x_pos = width // 2 # Center horizontally.
y_pos = height // 2 + 80 * np.sin(2 * np.pi * frame_i / fps)
y, x = np.ogrid[:height, :width]
r_sq = (x - x_pos) ** 2 + (y - y_pos) ** 2
img[r_sq < ball_radius**2] = [255, 200, 0] # Gold color
return img
rr.init("rerun_example_video_stream_synthetic")
# Setup encoding pipeline.
av.logging.set_level(av.logging.VERBOSE)
container = av.open("/dev/null", "w", format=formats[codec]) # Use AnnexB H.265 stream.
stream = container.add_stream(encoders[codec], rate=fps)
# Type narrowing
assert isinstance(stream, av.video.stream.VideoStream)
stream.width = width
stream.height = height
# TODO(#10090): Rerun Video Streams don't support b-frames yet.
# Note that b-frames are generally not recommended for low-latency streaming and may make logging more complex.
stream.max_b_frames = 0
# Log codec only once as static data (it naturally never changes). This isn't strictly necessary, but good practice.
rr.log("video_stream", rr.VideoStream(codec=codec), static=True)
# Generate frames and stream them directly to Rerun.
for frame_i in range(fps * duration_seconds):
img = create_example_video_frame(frame_i)
frame = av.VideoFrame.from_ndarray(img, format="rgb24")
for packet in stream.encode(frame):
if packet.pts is None:
continue
rr.set_time("time", duration=float(packet.pts * packet.time_base))
rr.log("video_stream", rr.VideoStream.from_fields(sample=bytes(packet)))
# Flush stream.
for packet in stream.encode():
if packet.pts is None:
continue
rr.set_time("time", duration=float(packet.pts * packet.time_base))
rr.log("video_stream", rr.VideoStream.from_fields(sample=bytes(packet)))
def __init__(codec, *, sample=None, opacity=None, draw_order=None)
Create a new instance of the VideoStream archetype.
| PARAMETER | DESCRIPTION |
|---|---|
codec
|
The codec used to encode the video chunks. This property is expected to be constant over time and is ideally logged statically once per stream.
TYPE:
|
sample
|
Video sample data (also known as "video chunk"). The current timestamp is used as presentation timestamp (PTS) for all data in this sample. There is currently no way to log differing decoding timestamps, meaning that there is no support for B-frames. See https://github.com/rerun-io/rerun/issues/10090 for more details. Rerun chunks containing frames (i.e. bundles of sample data) may arrive out of order, but may cause the video playback in the Viewer to reset. It is recommended to have all chunks for a video stream to be ordered temporally order. Logging separate videos on the same entity is allowed iff they share the exact same codec parameters & resolution. The samples are expected to be encoded using the Unless your stream consists entirely of key-frames (in which case you should consider See
TYPE:
|
opacity
|
Opacity of the video stream, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def cleared()
classmethod
Clear all the fields of a VideoStream.
def columns(*, codec=None, sample=None, opacity=None, draw_order=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
codec
|
The codec used to encode the video chunks. This property is expected to be constant over time and is ideally logged statically once per stream.
TYPE:
|
sample
|
Video sample data (also known as "video chunk"). The current timestamp is used as presentation timestamp (PTS) for all data in this sample. There is currently no way to log differing decoding timestamps, meaning that there is no support for B-frames. See https://github.com/rerun-io/rerun/issues/10090 for more details. Rerun chunks containing frames (i.e. bundles of sample data) may arrive out of order, but may cause the video playback in the Viewer to reset. It is recommended to have all chunks for a video stream to be ordered temporally order. Logging separate videos on the same entity is allowed iff they share the exact same codec parameters & resolution. The samples are expected to be encoded using the Unless your stream consists entirely of key-frames (in which case you should consider See
TYPE:
|
opacity
|
Opacity of the video stream, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def from_fields(*, clear_unset=False, codec=None, sample=None, opacity=None, draw_order=None)
classmethod
Update only some specific fields of a VideoStream.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
codec
|
The codec used to encode the video chunks. This property is expected to be constant over time and is ideally logged statically once per stream.
TYPE:
|
sample
|
Video sample data (also known as "video chunk"). The current timestamp is used as presentation timestamp (PTS) for all data in this sample. There is currently no way to log differing decoding timestamps, meaning that there is no support for B-frames. See https://github.com/rerun-io/rerun/issues/10090 for more details. Rerun chunks containing frames (i.e. bundles of sample data) may arrive out of order, but may cause the video playback in the Viewer to reset. It is recommended to have all chunks for a video stream to be ordered temporally order. Logging separate videos on the same entity is allowed iff they share the exact same codec parameters & resolution. The samples are expected to be encoded using the Unless your stream consists entirely of key-frames (in which case you should consider See
TYPE:
|
opacity
|
Opacity of the video stream, useful for layering several media. Defaults to 1.0 (fully opaque).
TYPE:
|
draw_order
|
An optional floating point value that specifies the 2D drawing order. Objects with higher values are drawn on top of those with lower values.
Defaults to
TYPE:
|
def visualizer(*, mappings=None)
Creates a visualizer for this archetype, using all currently set values as overrides.
| PARAMETER | DESCRIPTION |
|---|---|
mappings
|
Optional component mappings to control how the visualizer sources its data. ⚠️ Experimental: Component mappings are an experimental feature and may change. See https://github.com/rerun-io/rerun/issues/10631 for more information.
TYPE:
|
class ViewCoordinates
Bases: ViewCoordinatesExt, Archetype
Archetype: How we interpret the coordinate system of an entity/space.
For instance: What is "up"? What does the Z axis mean?
The three coordinates are always ordered as [x, y, z].
For example [Right, Down, Forward] means that the X axis points to the right, the Y axis points down, and the Z axis points forward.
Make sure that this archetype is logged at or above the origin entity path of your 3D views.
⚠ Rerun does not yet support left-handed coordinate systems.
⚠️ This type is unstable and may change significantly in a way that the data won't be backwards compatible.
Example
View coordinates for adjusting the eye camera:
import rerun as rr
rr.init("rerun_example_view_coordinates", spawn=True)
rr.log("world", rr.ViewCoordinates.RIGHT_HAND_Z_UP, static=True) # Set an up-axis
rr.log(
"world/xyz",
rr.Arrows3D(
vectors=[[1, 0, 0], [0, 1, 0], [0, 0, 1]],
colors=[[255, 0, 0], [0, 255, 0], [0, 0, 255]],
),
)
def __init__(xyz)
Create a new instance of the ViewCoordinates archetype.
| PARAMETER | DESCRIPTION |
|---|---|
xyz
|
The directions of the [x, y, z] axes.
TYPE:
|
def cleared()
classmethod
Clear all the fields of a ViewCoordinates.
def columns(*, xyz=None)
classmethod
Construct a new column-oriented component bundle.
This makes it possible to use rr.send_columns to send columnar data directly into Rerun.
The returned columns will be partitioned into unit-length sub-batches by default.
Use ComponentColumnList.partition to repartition the data as needed.
| PARAMETER | DESCRIPTION |
|---|---|
xyz
|
The directions of the [x, y, z] axes.
TYPE:
|
def from_fields(*, clear_unset=False, xyz=None)
classmethod
Update only some specific fields of a ViewCoordinates.
| PARAMETER | DESCRIPTION |
|---|---|
clear_unset
|
If true, all unspecified fields will be explicitly cleared.
TYPE:
|
xyz
|
The directions of the [x, y, z] axes.
TYPE:
|