pub struct Capsules3D {
pub lengths: Option<SerializedComponentBatch>,
pub radii: Option<SerializedComponentBatch>,
pub translations: Option<SerializedComponentBatch>,
pub rotation_axis_angles: Option<SerializedComponentBatch>,
pub quaternions: Option<SerializedComponentBatch>,
pub colors: Option<SerializedComponentBatch>,
pub labels: Option<SerializedComponentBatch>,
pub show_labels: Option<SerializedComponentBatch>,
pub class_ids: Option<SerializedComponentBatch>,
}Expand description
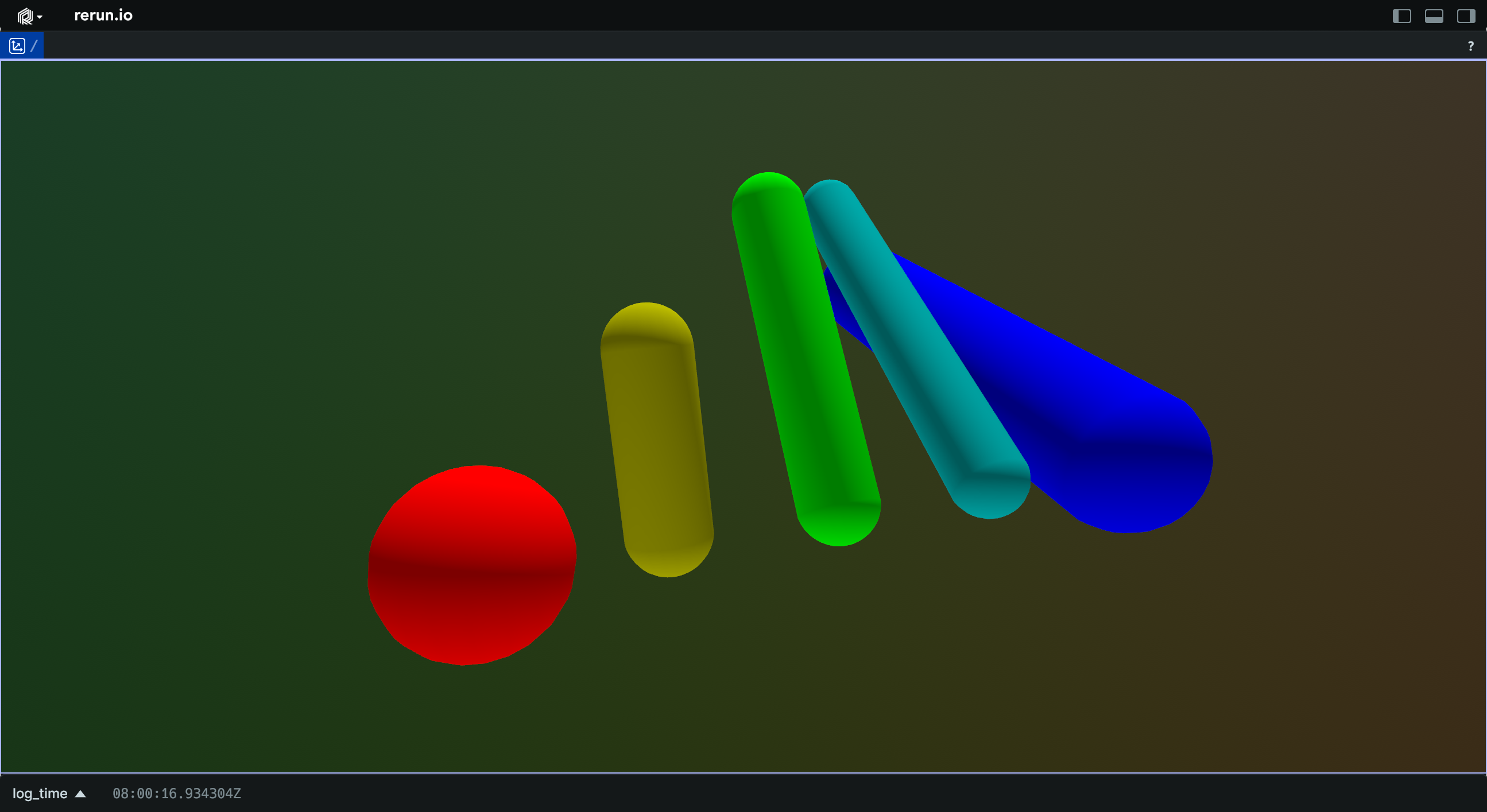
Archetype: 3D capsules; cylinders with hemispherical caps.
Capsules are defined by two endpoints (the centers of their end cap spheres), which are located at (0, 0, 0) and (0, 0, length), that is, extending along the positive direction of the Z axis. Capsules in other orientations may be produced by applying a rotation to the entity or instances.
§Example
§Batch of capsules
use rerun::external::glam::vec3;
fn main() -> Result<(), Box<dyn std::error::Error>> {
let rec = rerun::RecordingStreamBuilder::new("rerun_example_capsule3d_batch").spawn()?;
rec.log(
"capsules",
&rerun::Capsules3D::from_lengths_and_radii(
[0.0, 2.0, 4.0, 6.0, 8.0],
[1.0, 0.5, 0.5, 0.5, 1.0],
)
.with_colors([
rerun::Color::from_rgb(255, 0, 0),
rerun::Color::from_rgb(188, 188, 0),
rerun::Color::from_rgb(0, 255, 0),
rerun::Color::from_rgb(0, 188, 188),
rerun::Color::from_rgb(0, 0, 255),
])
.with_translations([
vec3(0., 0., 0.),
vec3(2., 0., 0.),
vec3(4., 0., 0.),
vec3(6., 0., 0.),
vec3(8., 0., 0.),
])
.with_rotation_axis_angles((0..5).map(|i| {
rerun::RotationAxisAngle::new(
[1.0, 0.0, 0.0],
rerun::Angle::from_degrees(i as f32 * -22.5),
)
})),
)?;
Ok(())
}
Fields§
§lengths: Option<SerializedComponentBatch>Lengths of the capsules, defined as the distance between the centers of the endcaps.
radii: Option<SerializedComponentBatch>Radii of the capsules.
translations: Option<SerializedComponentBatch>Optional translations of the capsules.
If not specified, one end of each capsule will be at (0, 0, 0).
Note that this uses a components::PoseTranslation3D which is also used by archetypes::InstancePoses3D.
rotation_axis_angles: Option<SerializedComponentBatch>Rotations via axis + angle.
If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
Note that this uses a components::PoseRotationAxisAngle which is also used by archetypes::InstancePoses3D.
quaternions: Option<SerializedComponentBatch>Rotations via quaternion.
If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
Note that this uses a components::PoseRotationQuat which is also used by archetypes::InstancePoses3D.
colors: Option<SerializedComponentBatch>Optional colors for the capsules.
labels: Option<SerializedComponentBatch>Optional text labels for the capsules, which will be located at their centers.
show_labels: Option<SerializedComponentBatch>Optional choice of whether the text labels should be shown by default.
class_ids: Option<SerializedComponentBatch>Optional class ID for the ellipsoids.
The class ID provides colors and labels if not specified explicitly.
Implementations§
Source§impl Capsules3D
impl Capsules3D
Sourcepub fn descriptor_lengths() -> ComponentDescriptor
pub fn descriptor_lengths() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::lengths.
Sourcepub fn descriptor_radii() -> ComponentDescriptor
pub fn descriptor_radii() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::radii.
Sourcepub fn descriptor_translations() -> ComponentDescriptor
pub fn descriptor_translations() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::translations.
Sourcepub fn descriptor_rotation_axis_angles() -> ComponentDescriptor
pub fn descriptor_rotation_axis_angles() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::rotation_axis_angles.
Sourcepub fn descriptor_quaternions() -> ComponentDescriptor
pub fn descriptor_quaternions() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::quaternions.
Sourcepub fn descriptor_colors() -> ComponentDescriptor
pub fn descriptor_colors() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::colors.
Sourcepub fn descriptor_labels() -> ComponentDescriptor
pub fn descriptor_labels() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::labels.
Sourcepub fn descriptor_show_labels() -> ComponentDescriptor
pub fn descriptor_show_labels() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::show_labels.
Sourcepub fn descriptor_class_ids() -> ComponentDescriptor
pub fn descriptor_class_ids() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::class_ids.
Sourcepub fn descriptor_indicator() -> ComponentDescriptor
pub fn descriptor_indicator() -> ComponentDescriptor
Returns the ComponentDescriptor for the associated indicator component.
Source§impl Capsules3D
impl Capsules3D
Sourcepub const NUM_COMPONENTS: usize = 10usize
pub const NUM_COMPONENTS: usize = 10usize
The total number of components in the archetype: 2 required, 3 recommended, 5 optional
Source§impl Capsules3D
impl Capsules3D
Sourcepub fn update_fields() -> Capsules3D
pub fn update_fields() -> Capsules3D
Update only some specific fields of a Capsules3D.
Sourcepub fn clear_fields() -> Capsules3D
pub fn clear_fields() -> Capsules3D
Clear all the fields of a Capsules3D.
Sourcepub fn columns<I>(
self,
_lengths: I,
) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
pub fn columns<I>( self, _lengths: I, ) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
Partitions the component data into multiple sub-batches.
Specifically, this transforms the existing SerializedComponentBatches data into SerializedComponentColumns
instead, via SerializedComponentBatch::partitioned.
This makes it possible to use RecordingStream::send_columns to send columnar data directly into Rerun.
The specified lengths must sum to the total length of the component batch.
Sourcepub fn columns_of_unit_batches(
self,
) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
pub fn columns_of_unit_batches( self, ) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
Helper to partition the component data into unit-length sub-batches.
This is semantically similar to calling Self::columns with std::iter::take(1).repeat(n),
where n is automatically guessed.
Sourcepub fn with_lengths(
self,
lengths: impl IntoIterator<Item = impl Into<Length>>,
) -> Capsules3D
pub fn with_lengths( self, lengths: impl IntoIterator<Item = impl Into<Length>>, ) -> Capsules3D
Lengths of the capsules, defined as the distance between the centers of the endcaps.
Sourcepub fn with_radii(
self,
radii: impl IntoIterator<Item = impl Into<Radius>>,
) -> Capsules3D
pub fn with_radii( self, radii: impl IntoIterator<Item = impl Into<Radius>>, ) -> Capsules3D
Radii of the capsules.
Sourcepub fn with_translations(
self,
translations: impl IntoIterator<Item = impl Into<PoseTranslation3D>>,
) -> Capsules3D
pub fn with_translations( self, translations: impl IntoIterator<Item = impl Into<PoseTranslation3D>>, ) -> Capsules3D
Optional translations of the capsules.
If not specified, one end of each capsule will be at (0, 0, 0).
Note that this uses a components::PoseTranslation3D which is also used by archetypes::InstancePoses3D.
Sourcepub fn with_rotation_axis_angles(
self,
rotation_axis_angles: impl IntoIterator<Item = impl Into<PoseRotationAxisAngle>>,
) -> Capsules3D
pub fn with_rotation_axis_angles( self, rotation_axis_angles: impl IntoIterator<Item = impl Into<PoseRotationAxisAngle>>, ) -> Capsules3D
Rotations via axis + angle.
If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
Note that this uses a components::PoseRotationAxisAngle which is also used by archetypes::InstancePoses3D.
Sourcepub fn with_quaternions(
self,
quaternions: impl IntoIterator<Item = impl Into<PoseRotationQuat>>,
) -> Capsules3D
pub fn with_quaternions( self, quaternions: impl IntoIterator<Item = impl Into<PoseRotationQuat>>, ) -> Capsules3D
Rotations via quaternion.
If no rotation is specified, the capsules align with the +Z axis of the local coordinate system.
Note that this uses a components::PoseRotationQuat which is also used by archetypes::InstancePoses3D.
Sourcepub fn with_colors(
self,
colors: impl IntoIterator<Item = impl Into<Color>>,
) -> Capsules3D
pub fn with_colors( self, colors: impl IntoIterator<Item = impl Into<Color>>, ) -> Capsules3D
Optional colors for the capsules.
Sourcepub fn with_labels(
self,
labels: impl IntoIterator<Item = impl Into<Text>>,
) -> Capsules3D
pub fn with_labels( self, labels: impl IntoIterator<Item = impl Into<Text>>, ) -> Capsules3D
Optional text labels for the capsules, which will be located at their centers.
Sourcepub fn with_show_labels(self, show_labels: impl Into<ShowLabels>) -> Capsules3D
pub fn with_show_labels(self, show_labels: impl Into<ShowLabels>) -> Capsules3D
Optional choice of whether the text labels should be shown by default.
Sourcepub fn with_many_show_labels(
self,
show_labels: impl IntoIterator<Item = impl Into<ShowLabels>>,
) -> Capsules3D
pub fn with_many_show_labels( self, show_labels: impl IntoIterator<Item = impl Into<ShowLabels>>, ) -> Capsules3D
This method makes it possible to pack multiple crate::components::ShowLabels in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_show_labels should
be used when logging a single row’s worth of data.
Sourcepub fn with_class_ids(
self,
class_ids: impl IntoIterator<Item = impl Into<ClassId>>,
) -> Capsules3D
pub fn with_class_ids( self, class_ids: impl IntoIterator<Item = impl Into<ClassId>>, ) -> Capsules3D
Optional class ID for the ellipsoids.
The class ID provides colors and labels if not specified explicitly.
Source§impl Capsules3D
impl Capsules3D
Sourcepub fn from_lengths_and_radii(
lengths: impl IntoIterator<Item = impl Into<Length>>,
radii: impl IntoIterator<Item = f32>,
) -> Capsules3D
pub fn from_lengths_and_radii( lengths: impl IntoIterator<Item = impl Into<Length>>, radii: impl IntoIterator<Item = f32>, ) -> Capsules3D
Creates a new Capsules3D with the given axis-aligned lengths and radii.
For multiple capsules, you should generally follow this with
Capsules3D::with_translations() and one of the rotation methods, in order to move them
apart from each other.
Sourcepub fn from_endpoints_and_radii(
start_points: impl IntoIterator<Item = impl Into<Position3D>>,
end_points: impl IntoIterator<Item = impl Into<Position3D>>,
radii: impl IntoIterator<Item = f32>,
) -> Capsules3D
pub fn from_endpoints_and_radii( start_points: impl IntoIterator<Item = impl Into<Position3D>>, end_points: impl IntoIterator<Item = impl Into<Position3D>>, radii: impl IntoIterator<Item = f32>, ) -> Capsules3D
Creates a new Capsules3D where each capsule extends between the given pairs of points.
Trait Implementations§
Source§impl Archetype for Capsules3D
impl Archetype for Capsules3D
Source§type Indicator = GenericIndicatorComponent<Capsules3D>
type Indicator = GenericIndicatorComponent<Capsules3D>
Source§fn name() -> ArchetypeName
fn name() -> ArchetypeName
rerun.archetypes.Points2D.Source§fn display_name() -> &'static str
fn display_name() -> &'static str
Source§fn required_components() -> Cow<'static, [ComponentDescriptor]>
fn required_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn recommended_components() -> Cow<'static, [ComponentDescriptor]>
fn recommended_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn optional_components() -> Cow<'static, [ComponentDescriptor]>
fn optional_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn all_components() -> Cow<'static, [ComponentDescriptor]>
fn all_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn from_arrow_components(
arrow_data: impl IntoIterator<Item = (ComponentDescriptor, Arc<dyn Array>)>,
) -> Result<Capsules3D, DeserializationError>
fn from_arrow_components( arrow_data: impl IntoIterator<Item = (ComponentDescriptor, Arc<dyn Array>)>, ) -> Result<Capsules3D, DeserializationError>
ComponentNames, deserializes them
into this archetype. Read moreSource§fn from_arrow(
data: impl IntoIterator<Item = (Field, Arc<dyn Array>)>,
) -> Result<Self, DeserializationError>where
Self: Sized,
fn from_arrow(
data: impl IntoIterator<Item = (Field, Arc<dyn Array>)>,
) -> Result<Self, DeserializationError>where
Self: Sized,
Source§impl AsComponents for Capsules3D
impl AsComponents for Capsules3D
Source§fn as_serialized_batches(&self) -> Vec<SerializedComponentBatch>
fn as_serialized_batches(&self) -> Vec<SerializedComponentBatch>
SerializedComponentBatches. Read moreSource§impl Clone for Capsules3D
impl Clone for Capsules3D
Source§fn clone(&self) -> Capsules3D
fn clone(&self) -> Capsules3D
1.0.0 · Source§fn clone_from(&mut self, source: &Self)
fn clone_from(&mut self, source: &Self)
source. Read moreSource§impl Debug for Capsules3D
impl Debug for Capsules3D
Source§impl Default for Capsules3D
impl Default for Capsules3D
Source§fn default() -> Capsules3D
fn default() -> Capsules3D
Source§impl PartialEq for Capsules3D
impl PartialEq for Capsules3D
Source§impl SizeBytes for Capsules3D
impl SizeBytes for Capsules3D
Source§fn heap_size_bytes(&self) -> u64
fn heap_size_bytes(&self) -> u64
self uses on the heap. Read moreSource§fn total_size_bytes(&self) -> u64
fn total_size_bytes(&self) -> u64
self in bytes, accounting for both stack and heap space.Source§fn stack_size_bytes(&self) -> u64
fn stack_size_bytes(&self) -> u64
self on the stack, in bytes. Read moreimpl ArchetypeReflectionMarker for Capsules3D
impl StructuralPartialEq for Capsules3D
Auto Trait Implementations§
impl Freeze for Capsules3D
impl !RefUnwindSafe for Capsules3D
impl Send for Capsules3D
impl Sync for Capsules3D
impl Unpin for Capsules3D
impl !UnwindSafe for Capsules3D
Blanket Implementations§
Source§impl<T> BorrowMut<T> for Twhere
T: ?Sized,
impl<T> BorrowMut<T> for Twhere
T: ?Sized,
Source§fn borrow_mut(&mut self) -> &mut T
fn borrow_mut(&mut self) -> &mut T
Source§impl<T> CheckedAs for T
impl<T> CheckedAs for T
Source§fn checked_as<Dst>(self) -> Option<Dst>where
T: CheckedCast<Dst>,
fn checked_as<Dst>(self) -> Option<Dst>where
T: CheckedCast<Dst>,
Source§impl<Src, Dst> CheckedCastFrom<Src> for Dstwhere
Src: CheckedCast<Dst>,
impl<Src, Dst> CheckedCastFrom<Src> for Dstwhere
Src: CheckedCast<Dst>,
Source§fn checked_cast_from(src: Src) -> Option<Dst>
fn checked_cast_from(src: Src) -> Option<Dst>
Source§impl<T> CloneToUninit for Twhere
T: Clone,
impl<T> CloneToUninit for Twhere
T: Clone,
§impl<T> Conv for T
impl<T> Conv for T
§impl<T> Downcast for Twhere
T: Any,
impl<T> Downcast for Twhere
T: Any,
§fn into_any(self: Box<T>) -> Box<dyn Any>
fn into_any(self: Box<T>) -> Box<dyn Any>
Box<dyn Trait> (where Trait: Downcast) to Box<dyn Any>. Box<dyn Any> can
then be further downcast into Box<ConcreteType> where ConcreteType implements Trait.§fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
Rc<Trait> (where Trait: Downcast) to Rc<Any>. Rc<Any> can then be
further downcast into Rc<ConcreteType> where ConcreteType implements Trait.§fn as_any(&self) -> &(dyn Any + 'static)
fn as_any(&self) -> &(dyn Any + 'static)
&Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &Any’s vtable from &Trait’s.§fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
&mut Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &mut Any’s vtable from &mut Trait’s.§impl<T> DowncastSync for T
impl<T> DowncastSync for T
§impl<T> Instrument for T
impl<T> Instrument for T
§fn instrument(self, span: Span) -> Instrumented<Self>
fn instrument(self, span: Span) -> Instrumented<Self>
§fn in_current_span(self) -> Instrumented<Self>
fn in_current_span(self) -> Instrumented<Self>
Source§impl<T> IntoEither for T
impl<T> IntoEither for T
Source§fn into_either(self, into_left: bool) -> Either<Self, Self>
fn into_either(self, into_left: bool) -> Either<Self, Self>
self into a Left variant of Either<Self, Self>
if into_left is true.
Converts self into a Right variant of Either<Self, Self>
otherwise. Read moreSource§fn into_either_with<F>(self, into_left: F) -> Either<Self, Self>
fn into_either_with<F>(self, into_left: F) -> Either<Self, Self>
self into a Left variant of Either<Self, Self>
if into_left(&self) returns true.
Converts self into a Right variant of Either<Self, Self>
otherwise. Read moreSource§impl<T> IntoRequest<T> for T
impl<T> IntoRequest<T> for T
Source§fn into_request(self) -> Request<T>
fn into_request(self) -> Request<T>
T in a tonic::RequestSource§impl<Src, Dst> LosslessTryInto<Dst> for Srcwhere
Dst: LosslessTryFrom<Src>,
impl<Src, Dst> LosslessTryInto<Dst> for Srcwhere
Dst: LosslessTryFrom<Src>,
Source§fn lossless_try_into(self) -> Option<Dst>
fn lossless_try_into(self) -> Option<Dst>
Source§impl<Src, Dst> LossyInto<Dst> for Srcwhere
Dst: LossyFrom<Src>,
impl<Src, Dst> LossyInto<Dst> for Srcwhere
Dst: LossyFrom<Src>,
Source§fn lossy_into(self) -> Dst
fn lossy_into(self) -> Dst
§impl<T> NoneValue for Twhere
T: Default,
impl<T> NoneValue for Twhere
T: Default,
type NoneType = T
§fn null_value() -> T
fn null_value() -> T
Source§impl<T> OverflowingAs for T
impl<T> OverflowingAs for T
Source§fn overflowing_as<Dst>(self) -> (Dst, bool)where
T: OverflowingCast<Dst>,
fn overflowing_as<Dst>(self) -> (Dst, bool)where
T: OverflowingCast<Dst>,
Source§impl<Src, Dst> OverflowingCastFrom<Src> for Dstwhere
Src: OverflowingCast<Dst>,
impl<Src, Dst> OverflowingCastFrom<Src> for Dstwhere
Src: OverflowingCast<Dst>,
Source§fn overflowing_cast_from(src: Src) -> (Dst, bool)
fn overflowing_cast_from(src: Src) -> (Dst, bool)
§impl<T> Pipe for Twhere
T: ?Sized,
impl<T> Pipe for Twhere
T: ?Sized,
§fn pipe<R>(self, func: impl FnOnce(Self) -> R) -> Rwhere
Self: Sized,
fn pipe<R>(self, func: impl FnOnce(Self) -> R) -> Rwhere
Self: Sized,
§fn pipe_ref<'a, R>(&'a self, func: impl FnOnce(&'a Self) -> R) -> Rwhere
R: 'a,
fn pipe_ref<'a, R>(&'a self, func: impl FnOnce(&'a Self) -> R) -> Rwhere
R: 'a,
self and passes that borrow into the pipe function. Read more§fn pipe_ref_mut<'a, R>(&'a mut self, func: impl FnOnce(&'a mut Self) -> R) -> Rwhere
R: 'a,
fn pipe_ref_mut<'a, R>(&'a mut self, func: impl FnOnce(&'a mut Self) -> R) -> Rwhere
R: 'a,
self and passes that borrow into the pipe function. Read more§fn pipe_borrow<'a, B, R>(&'a self, func: impl FnOnce(&'a B) -> R) -> R
fn pipe_borrow<'a, B, R>(&'a self, func: impl FnOnce(&'a B) -> R) -> R
§fn pipe_borrow_mut<'a, B, R>(
&'a mut self,
func: impl FnOnce(&'a mut B) -> R,
) -> R
fn pipe_borrow_mut<'a, B, R>( &'a mut self, func: impl FnOnce(&'a mut B) -> R, ) -> R
§fn pipe_as_ref<'a, U, R>(&'a self, func: impl FnOnce(&'a U) -> R) -> R
fn pipe_as_ref<'a, U, R>(&'a self, func: impl FnOnce(&'a U) -> R) -> R
self, then passes self.as_ref() into the pipe function.§fn pipe_as_mut<'a, U, R>(&'a mut self, func: impl FnOnce(&'a mut U) -> R) -> R
fn pipe_as_mut<'a, U, R>(&'a mut self, func: impl FnOnce(&'a mut U) -> R) -> R
self, then passes self.as_mut() into the pipe
function.§fn pipe_deref<'a, T, R>(&'a self, func: impl FnOnce(&'a T) -> R) -> R
fn pipe_deref<'a, T, R>(&'a self, func: impl FnOnce(&'a T) -> R) -> R
self, then passes self.deref() into the pipe function.§impl<T> Pointable for T
impl<T> Pointable for T
Source§impl<T> SaturatingAs for T
impl<T> SaturatingAs for T
Source§fn saturating_as<Dst>(self) -> Dstwhere
T: SaturatingCast<Dst>,
fn saturating_as<Dst>(self) -> Dstwhere
T: SaturatingCast<Dst>,
Source§impl<Src, Dst> SaturatingCastFrom<Src> for Dstwhere
Src: SaturatingCast<Dst>,
impl<Src, Dst> SaturatingCastFrom<Src> for Dstwhere
Src: SaturatingCast<Dst>,
Source§fn saturating_cast_from(src: Src) -> Dst
fn saturating_cast_from(src: Src) -> Dst
§impl<T> Tap for T
impl<T> Tap for T
§fn tap_borrow<B>(self, func: impl FnOnce(&B)) -> Self
fn tap_borrow<B>(self, func: impl FnOnce(&B)) -> Self
Borrow<B> of a value. Read more§fn tap_borrow_mut<B>(self, func: impl FnOnce(&mut B)) -> Self
fn tap_borrow_mut<B>(self, func: impl FnOnce(&mut B)) -> Self
BorrowMut<B> of a value. Read more§fn tap_ref<R>(self, func: impl FnOnce(&R)) -> Self
fn tap_ref<R>(self, func: impl FnOnce(&R)) -> Self
AsRef<R> view of a value. Read more§fn tap_ref_mut<R>(self, func: impl FnOnce(&mut R)) -> Self
fn tap_ref_mut<R>(self, func: impl FnOnce(&mut R)) -> Self
AsMut<R> view of a value. Read more§fn tap_deref<T>(self, func: impl FnOnce(&T)) -> Self
fn tap_deref<T>(self, func: impl FnOnce(&T)) -> Self
Deref::Target of a value. Read more§fn tap_deref_mut<T>(self, func: impl FnOnce(&mut T)) -> Self
fn tap_deref_mut<T>(self, func: impl FnOnce(&mut T)) -> Self
Deref::Target of a value. Read more§fn tap_dbg(self, func: impl FnOnce(&Self)) -> Self
fn tap_dbg(self, func: impl FnOnce(&Self)) -> Self
.tap() only in debug builds, and is erased in release builds.§fn tap_mut_dbg(self, func: impl FnOnce(&mut Self)) -> Self
fn tap_mut_dbg(self, func: impl FnOnce(&mut Self)) -> Self
.tap_mut() only in debug builds, and is erased in release
builds.§fn tap_borrow_dbg<B>(self, func: impl FnOnce(&B)) -> Self
fn tap_borrow_dbg<B>(self, func: impl FnOnce(&B)) -> Self
.tap_borrow() only in debug builds, and is erased in release
builds.§fn tap_borrow_mut_dbg<B>(self, func: impl FnOnce(&mut B)) -> Self
fn tap_borrow_mut_dbg<B>(self, func: impl FnOnce(&mut B)) -> Self
.tap_borrow_mut() only in debug builds, and is erased in release
builds.§fn tap_ref_dbg<R>(self, func: impl FnOnce(&R)) -> Self
fn tap_ref_dbg<R>(self, func: impl FnOnce(&R)) -> Self
.tap_ref() only in debug builds, and is erased in release
builds.§fn tap_ref_mut_dbg<R>(self, func: impl FnOnce(&mut R)) -> Self
fn tap_ref_mut_dbg<R>(self, func: impl FnOnce(&mut R)) -> Self
.tap_ref_mut() only in debug builds, and is erased in release
builds.§fn tap_deref_dbg<T>(self, func: impl FnOnce(&T)) -> Self
fn tap_deref_dbg<T>(self, func: impl FnOnce(&T)) -> Self
.tap_deref() only in debug builds, and is erased in release
builds.